Jumal ON.

Veebileht kujutab endast autori (minu) katsetust: kutsuda diskussioonile Teadlasi, füüsikuid.
Jumal ON.
We did the 36,000-foot, airplane-over-the-Grand-Canyon view of your stats page, and last month, we walked up to the lip of the Canyon and peered down at the days, weeks, and months views. Today — if I may labor the metaphor — we’ll hop on the stats donkey and ride down to take a closer look at Top Posts and Pages.
(We’re done with the Grand Canyon thing, promise.)
Taking a look at your Top Posts and Pages gives you a quick, clear idea of what’s most popular. You can use this valuable data to inform future posts, but also to make sure your perennially popular content is polished and primed to turn a casual visitor into a die-hard reader.
Log in to WordPress.com, and head to the stats tab in your Reader. Just under the main graph tracking your daily views and visitors…
View original post 831 more words
Eesti Televisioon teatas: Eesti Riigikogu hakkab “moodustama” kardavoi-ametnikku.
puutumatut, tunnistaja-õiguslikku, ja haridus-nõudeta.
EV Riigikogu menetleb (!NB!) SEADUST : politseiniku “puutumatusest” (Väärikiast solvumisest!? – a´la “Kommunismiehitaja…”)
“Laste Kuningriigis tapeti kõik, kes olid “üle 18”.
Need olid LOLLID!
Liikumise kirjeldamisel on hädavajalik, et matemaatik saaks usaldada temale esitatud (mõttelise) katse adekvaatsust ja otstarbekust; et füüsik usaldaks matemaatilise aparatuuri “eksimatust” – esitatud alustel. Selliseks pöördumiseks ei oleks olnud vajadust ca 100 aastat tagasi, mil näiteks teadlased Lorentz´, Poincare´ja Minkowski said vaid täiendada üksteist, laskumata eraldi-kontrolliks arutluste “kaalutlemisse”.
Järgnevas tekitabki veidi kõhedust: kaasaegne arusaam reaalteaduste jäigast eristamisest, milles harva kui mõni matemaatik füüsikut mõistab, see aga omakorda matemaatiliste eelduste otstarbekuses kahtleb.
/Küsimusi tekitas (antud blogi-väliselt!): nimelt see matemaatikaülesanne 1907-ndast aastast (I. – II. õppeaasta õpilastele). Lahkame neid jõudumööda./
1. Ülesande üleskirjutuses kasutan (oma) Liikumisteisenduste vormi, kujul:
f (ut) = ut(1 – v/u); kuid ülesandes on esitatud (meelega?) ruumivahemik “I. sündmuse” toimumise hetkel (t = 0) hoopis mõõdetuna kui (4 t)x(28ww/t) = 112w ?
Tõepoolest nimelt (ehk?) sellepärast saigi see ülesanne konkreetselt esitatud, et see näitab teisendusfunktsiooni´de f ja g sõltumatust “signaali olemusest”, millega esialgne vahemaa on mõõdetud. Enamgi veel: teisendus ise – EI SISALDA AEGA, mõõtühikuna!
Eelnevat tulebki nii mõista: teisendusfunktsioon f (ct) määrab ära “liikumise oleku”, nii nagu me oleme seda tavaks hakanud pidama: = Igal ajahetkel jätab liikuv keha oma trajektooril justkui mingi “jälje”, millel see keha mingil ajahetkel t parajasti viibis (või hakkab olema); järjestikuste jälgede “ühendamisel” saamegi trajektoori, mida me loeme pidevaks; esitatud mudeliga saame esitada/taastada keha liikumise ja asukoha ruumis – vastavalt Vaatleja poolt mõõdetud signaaliga c või siis teise keha poolt mõõdetuna, kui u > v.
2. Matemaatikule esitatud “liikumise mudel” – teisendusfunktsiooni f (ct) kujul – võimaldab vaadelda/mõõta juba relatiivses liikumises olevate kehadega toimuvaid protsesse, sealhulgas “sündmustevahelisi intervalle”, millede jäävus eraldi inertsiaalsüsteemides – on inertsiaalsüsteemi mõiste määratluses. /Erirelatiivsusteoorias oli selleks matemaatikuks, kes Lorentz-teisendustele “liikuvuse” andis: nii Poincare´kui ka Minkowski. Ja nimelt matemaatikute poolt esitatu: saabki olla vaid sedavõrd tõene, kuivõrd on tõene esitatud liikumise mudel! 1907-nda aasta esitatud ülesanne on “matemaatika” all ülesandena esitatud, kuid OLEKS võinud (pidanud!) olla nimelt füüsika õpikus./
3. Erirelatiivsusteooria EI käsitle “signaalina” teisi kiirusi peale valguse kiiruse c, lugedes selle nö. absoluutseks (ja signaalina võimalikuks!?) kiiruseks?
See nüüd küll minu “viga” ei ole: lihtsalt seda pole vajalikuks peetud!? Teisalt (olen seda teinud oma lahtikirjutustes Internetis) saab/peab siiski füüsikute poolt lahtiseletama “3 keha liikumine”: 1 – kui Vaatleja; 2. – kui kiirusel v (V suhtes); ja 3. – kui kiirusel u > v (V suhtes). Antud ülesande raamidesse see ei mahu.
Ülesande konkreetne lahendus – sündmustevahelise kaugusena Vaatleja ruumis – on g(ct) = ct/(1 – v/c) = 336w;
“Sündmustevahelise intervalli jäävus” avaldub liitfunktsioonina: g(f(ct)) = ct = 112w.
Aeg on juba elemtaarne: 336/42 = 8tundi.
W. Prawdin ja R. Mühlmann.
“Ülesannete kogu rahwakoolidele.”
I. – II. kooliaasta.
Arwud esimese tuhande piiris.
Walgas 1907
lk. 85
< Ülesanded.
113) Raudtee jaamast sõitis kaubarong, mille kiirus 28 wersta tunnison, wälja; 4 tunni pärast sõitis sellestsamast jaamast reisijate-rong, mille kiirus 42 wersta tunnis on, kaubarongile järele.
Mitme tunniga jõuab reisijaterong kaubarongile järele?
Mudel:
“Sündmuste geomeetria” sirgel v/u, v = 28w; u = 42w; Jaam A; rongid V ja U.
“I. Sündmus”:
Alghetk, mil VU = 4×28 = 112w;
“II. Sündmus”:
Rongide kohtumine: VU = 0;
Galilei teisendus: f (ct) = ct(1 – v/c); f (112w) = 112w(1 – 28/42) = 112x(1/3)w;
Pöördteisenduse funktsioon: g (112w) = 112x3w = 336 wersta;
“Sündmuste I. ja II. vaheline aeg arvutame: 336(w):42(w/h) = 8 h;
Vastus:
Reisirong jõuab kaubarongile järele 8 tunni pärast.
Inimene on Looduse Euro.
Liikumise filosoofiast: Google Reader (1000 +) http://ow.ly/nbZuv
Me oleme nüüd siis “leidnud” selle bosoni, mis “annab” osakestele “laiskuse”!
Laiskus – kui inertsi mõõt.
Ikka ja taas tullakse välja väidetega, justnagu boson ise küll on olemas, kuid me “ei tea, mis asi on gravitatsioon?” jne.
Kuid KUI boson “on olemas” (tähenduses: on olemas SEOS min. osakese (neutriino?) max. kiiruses c, mille kulgliikumine määrab “osakese b” olemasolu – ja “valmiduse” : “haakida enda külge” ristliikumises (ortogonaalses olekus) teine neutriino – mis annab osakesele b MASSI (footoni massi – erineva, sõltuvalt kulgliikumise (-hulgast, relatiivsetes ruumides).
Seega: ei ole ei inertsi ega massi, enne kui realiseeruvad dubleeruvad seosed footoni tekkeks.
Gravitatsioon “tekib”, kui (juba) footonid ühinevad (kleepuvad) nende bosonite abil – andes juba nö. MONAADSED SEOSED – võimaldades signaali c “vahetusega” – mõõta Aegruumi.
Inertsiaalsüsteemide kiiruste geomeetriast ja selle erinevusest keskkondade kiiruste reaalsel liitumisel.
Olen saanud ettepaneku: esitada (oma) arutlused nö. vektoriaalkujul. Olen proovinud, kuid see viiks taas (mõnes võimalikus mudelis) apoorilistesse lihtsustustesse – mudeli idealiseerimisena.
Näiteks on ju Lorentz-teisendustega esitatavate “kiiruste liitmis-seostega” (NB! Minul samasel algebralisel kujul!). Need avalduvad kui geomeetrilised (sund)seosed, milles kaks inertsiaalsüsteemi “moodustavad kui mingi keskmiku” – ja seda vaadeldakse V poolt (mingis V absoluutses inertsiaalsüsteemis, milles kiirus v ei muutu, kuid muutub signaali c kiirus, sõltuvalt nurgast a kiiruste v ja c vahel. Reaalsuses kuid sellist “keskmistatud kiirust” ei ole olemas, niikui pole ka ju “raskuskeset”.
Selline mudelite paljusus teebki mõttetuks esitada liikumist (eriti selle additiivsel kujul) vektoriaalselt.
Olen vaadanud erinevaid teaduslikke sõnastusi, kuid pole leidnud midagi paremat kui kahe erineva keskkonna liikumise liitumine.
Selline määratlus on Einsteinil toodud füüsikasõnaraamatuis, kirjeldamaks temanimelist peeglikatset (katse on esitatud mõttelisena, kuid on ammu leidnud kinnitust praktiliselt kiirendeis – nt. kiirendatud osakeste-frondile energia lisamisel “küljelt” – kuid mis on jäänud tähelepanuta, sest energia-lisad on osutunud ebaefektiivseiks).
Mudelid
Lähtudes Liikumisteisendustest
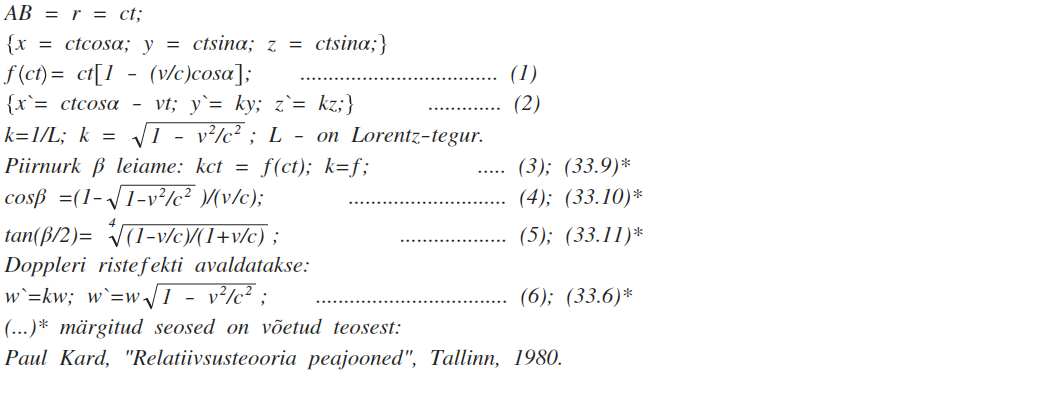
// f(ct) = ct(1 – (v/c)cosa); ja g = 1/f; //
Võime vaadelda kaht “põrkuvat” keskkonda erinevates “seisundites”:
1) keskkonnad ei interakteeru omavahel. Selline keskkond käitub kui ideaalne (seostatud) hulk – mingis seda hulka “mahutavas” relatiivses ruumis; (näitena neutriinode voog, mille reaktsioon “meie keskkonnale” võib muundada küll mõne neutriino, kuid muundumisena – see osake ju “lahkub sest voost”.
2) mõjukusena eristuvad keskkonnad:
a) ühe, prevaleeriva, keskkonna ja teise, mis ei avalda mõju liitliikumisele (me ei vaatle põhjusi); sellisteks keskkondade liitliikumise “tulem” – jääb kiiruse sihina esimese keskkonna kiirus (näitena ojade suubumine jõkke või lisajõgede suubumine emajõkke;
b) parimaiks vabadeks keskkondadeks on merehoovused, mis on kaasajal hästi jälgitavad, nii võrdväärsetena kui erinevatena; siinjuures ongi üks ilmekamaid näiteid: keskmistatud (keskkonna)-liikumise reaalsest mudelist.
Viimane mudel on ilmekamaid näiteid relatiivsest liikumisest, milles on Absoluutne Ruum (Ookeanina); hoovuste erinevad kiirused (suuruselt ja suunalt); erinevate kiiruste mõjukuse tulem (liitkiiruse sihilt); ja liitkiiruse reaalne väljund.
PS. Mõjukuse küsimus relatiivses kiiruses – jääb minu jaoks täielikult lahtimõtestamata, arvestades minu vananenud haridust ja vananenud organismust. Noortele!
Osundan sissejuhatuseks David Lodge “Mõtleb…”, lk.11.-12..:
= Ma mõtlesin ju … William Jamesile ja teadvusele kui voolule või teadvusele kui linnule, kes lendab ja oksale laskub … huvitav küsimus on see kas need linnu laskumised on mõtte lõpetus või mõttepausid, lüngad, valged lehed või valge müra oleks parem, sest aju töötab kogu aeg, muidu oleksid surnud … Selles suhtes on “mõtlen, järelikult olen olemas” päris tõsi … Küllap see on filosoofia ajaloo kõige tuntum lause. Ei tea, milline on tuntuselt järgmine? Kuid kas mõtlemine on pidevvältimatu, või on asi nii, nagu keegi Descartes`iga vaieldes ütles: mõnikord ma mõtlen ja mõnikord lihtsalt olen … Kas ma saan lihtsalt olendada, ilma mõtlemata? =
//Keeleliselt: võiks kaaluda sõna “olendada” … “olelema”, “olesklema”?!//
II. Lause on ju koheselt võtta: “Liikumist ei ole olemas.”
/Zenoni apooria!/ … Selle kallal ma töötangi: püüdeis ühendada: Galileo ruumiteisendusi + Valiku (Zermelo) aksioom!
Riiklus; omavalitsus; maffia versus lihtrahvas. 4.03.2009
Riiklus – on vajalik institutsioon, milleta me ei jää püsima.
Omavalitsus – jäänukina möisavallast, kohalikest kardavoidest ja täitevkomiteedest,
mida alati on kamandanud ideoloogiad (kristlus. venelased, kommunistid ja marksistlikud majandusteadlased) – on jäänud kubjastena kamandama ühiskondlikku kogukonda.
Maffia – see on väljakujunenud keskerakondlus, milles Esimees vöimukalt varastab
Riigilt ja siis jaotab suvatahtsi küll omavalitsuse struktuuridele, küll parteirakukestele vöi
siis üksikisikuile.
Lihtrahvas – tavainimesed, kelle valikuvabadus on taandatud suhtele 1: 1 500 000.
Kilter, kubjas, aidamees – köik nad on rahva kallal, niikui Tönismäe marodöörid,
varastades ka surnuilt, maksustades peieviina ja omastades orvud.
Igavene tuli ! – NEILE.
Presidentidest.
Arvamus
Naljakas, jah, kuis poliitiline infantiilsus võib haiglases ambitsioonikuses moonduda: teada-tuntud faktina, et mistahes ajaloo “kordamine” – saab muutuda ainuüksi farsiks.
Eesti Wabariik OLI demokraatlik riik, kuni vapside (vabadussõdalaste) ilmse ja ülekaaluka võiduni üleriiklikel valimistel. Selliseks puhuks “olid valmistunud” bürokraatlikud vöimustruktuurid, kellel oli kaotada liialt palju. Vapsidel sellised struktuurid puudusid. Killustatud “rahvamassina” oleksid nad vast peale valimisvõitu pidanud hakkama looma “oma” võimu-vahendeid. Kuidas oli aga “betoneerunud” Võim? ehk: mil viisil saavutas võimustruktuur diktatuurile sobilikud vahendid ja “seadustuse”?
01. detsembri mäss 1924. aastal. Ajalooliselt kirjeldatakse seda kui ülestõusu!? Kas see ikka oli nii? Tollal töötasid mu isa ja ema Toompeal ning järgnevat kirjeldan oma ema sõnutsi.
Peterburg-Tallinn RONGIGA olid Balti Jaama sissesöitnud “kotimehed” – tollal tavaline pilt Venemaa näljahädalistest – nii et midagi “erakordset” selles ei olevat nähtud. “Vallutuse fiasko” oli aga juba algselt “sisseprogrammeeritud”: koheselt lasti maha jaamas korravalves olnud süütud militsionäärid; korrapäratu tulistamine oli aga kuulda nii all-linnas kui Toompeal. Mu isagi oli (ema sõnutsi: naiivsena!) laskunud mööda jäätunud Patkuli treppe – uudistama erakordset. Üksikute, veel kostvate, laskude taustal sebisid ringi ehtsad “bufaikades” vene keelt räuskavad kotimehed, relvastudes käigult pikkade vintpüssidega. Asi oleks tundunud koguni anekdootlikuna, kui maas poleks näha olnud lebama jäetud ohvreid. Tagantjärele on palju targutatud sellise ofensiivi “vigadest” ja organiseerimatusest, kuid rahva seas (leinast hoolimata) levisid visad kuuldused provokatsioonist – võimustruktuuride konsolideerumiseks. Täiustati/tugevdati sisekaitset – ja President sai Kõrgeimaks Ülemjuhatajaks. Kõik see saigi 40-ndate Eesti Riigi huku alguseks!
Praegune EV President tegi aktuaalselt vajaliku sammu: nõrgestas taas presidentaalset võimu, andes endalt Ülemjuhataja õigused! Minule oli selle sammu vajadus koheselt nähtav, kahjuks mitte paljudele. Siiani kõlab populistlikke hüüatusi: “Kõik võim Presidendile!”, varjates selle mõtet hämara loosungi taha “Presidendi otsevalimistest”?! Hr. T.H.I. aga ilmselt tunnetas: kohaliku vastasseisu mistahes provokatiivse mässu ohtlikkust – ja Riigi haavatavust sellises üleskutses, mil Presidendil on “erandlik ülemvõim”!?
“Naljakaks” – halenaljakaks – teebki siinjuures Indrek Tarandi osalus sellises, fabritseeritud, valimiskomöödias! Kellena Ta esineb siinjuures? Kas Tal on Tema valinud inimeste mandaat?! Ei ole. Kas Ta esineb Keskpartei nimel? Ei. Seega Tal puudub valimisteks nii programm kui toetajaskond – soov vaid provotseerida järjekordset (ajakirjanduslikku?) poleemikat DEMOKRAATIAST. Põhiseaduslikult on paika pandud: Presidendi VALIB – RAHVA POOLT VALITUD ESINDUSKOGU! Diskuteerida võib (ei pea!) DELFIS, fb-s vm. – minupärast või Tallinna TV-s – kuid jätku hämamine!
Kui kaua tahaksin elada, veel ?
Arvamus
Saan sel aastal niisiis juba 70-seks. Ja eks meid, “kuuekümnendaid”, ole ehk veel nii mõnigi järele jäänud. Lahkunuidki palju. Olekski vast hea, tagasivaatena, mõlgutada: kas on ikka tehtud siin kõik, mis olnud võimalik, või peaks veel jätkama, või milleks?
60-ndate sigri-migrist.
Kümnendivahetusel olin lõpetanud keska ja tahtsin omandada kõrgharidust. Kas olekski mul olnud mingi muu valik? Oleks küll, nagu selgus hilisemast, kuid eks olukorrad ja asjaolud panevad siin elus ju ise kõik paika. Kodu lähedus meelitas mu TPI-sse, kuid järgmiseks suveks olin täielikult pettunud: minus ei olnud “asjastatud reaalteadustest” huvi. Teadusraamatukogus oli aga paljutki. Nõnna siis kolisingi TRÜ-sse – otse sinna “teadusse”. Paraku ka see lõppes pea: algas “Kuuba kriis”. Mekkinult aga juba loogikate ranget ilu – jäigi see mulle külge, vahel endki üllatades. Ja nimelt “nende”, sest ainult deduktiivses arutluses tekkisid üpris tihtigi vastuolud – reaalsuses. Juba ainuüksi see “dialektiline meetod: eituse eitus kui jaatus?!” – pani muigvele. Loomulikult, naerda ei tohtinud! Kas või kuidas “läksid minust mööda” need tormilised aastad, ei mäletagi nagu õieti. Ehk oli asi 3 aastas kroonus, mille veetsin Siguldas. Tagantjärele mõeldes: ilus oli ju sealgi. Oleks olnud igavalt kurnavgi, kui poleks olnud teatrit, raamatuid, ja Siguldat ennast, koos lätlastega.
Tollasesse sigri-migrisse mahtus ju nii mõndagi: esimene suudlus, armumine, lahkuminek ja abiellumine… . Esimene laps ja mänglevalt valitud (mistahes) töökohad. Väike naps ja vahel ka tants – kellel siis aegagi jäi, süüvimaks mingisse poliitikasse, kuigi, jah, teadlik ma sest olin.
80-ndad.
Teine abielu, veel kaks last ja rabelemine – kuni maandusimegi hubaselt katlamaja personaliks. Rahulik elu, koos rohke lahja õllega ja juba süsteemse lugemusega. Kriminullid? Jah, ka neid oli rohkesti, eriti kui lisasin neile venekeelse repertuaari. Välja hakkas kujunema maailmavaateline hoiak, mis mul siiani üpris “teaduslik”, ja seega rabe, kippus olema. Tõuke andis prof. Ed. Tennmanni “Hinge surematus”, nii et kõigile selgem saaks: teleoloogiline “personalism”. Selle rakendamine matemaatilisse arutlusse – andis ka uue tõuke füüsikalisse liikumise kirjeldamis-katsetesse, mida tollal (õnneks või õnnetuseks?) keegi tunnustada ei tahtnud. Õnneks, sest see mudel oli veel liig toores.
90-ndate poliitikast.
Siiani poliitiliselt nö. olesklev vaikelu muutus radikaalselt, andes pöördena üpris aktiivse eestlase, koos kooperatiivi asutamisega ja RR aktivistina. Vaevalt et nüüd otse isikuliselt minust midagi “maha jäi”, kuid osalemine oli see siiski.
Sajandite-vahetuse elegantne ilu.
Eesti Vabariigi sünd, raha, “halb eluiga” – ja raskusi kui palju: incl. lapselapsed! Pojast pole mul midagi: tema juba endale lapsi koormaks pole võtnud. (Tarkus või lollus? – mine võta sa nüüd kinni?!) Kahest tütrest on aga saanud 17 lapselast (!?). Kuidas see nüüd küll asjakohane on, ei tea, ehk ei olegi.
Vaimne kokkuvõte.
Aktuaalsuses olen nüüdseks haaratud “ühitamatute ühildamisega”: pärast Ed.Tennmanni – püüetega viia see maailmavaade liikumise mudelisse; pärast Peter Watsoni “Kohutav ilu. 20.sajandi intellektuaalne ajalugu.” – olen ikka ja jälle püüdnud teadvustada (kellele?) eugeenika-liikumise jäledust ning olen jäägitult pühendunud SELLE likvideerimis-katsetesse; kas või kuidas see mul õnnestub, ei oska öelda, sest tõepoolest: allutatuna 50-aastasesse hirmu-unenäkku, põeb kaasaegne Eesti ühiskond seda paranoilist Kopenhaageni sündroomi rõemsalt edasi – kartes ja kahtlustades – või siis “eugeenikast mööda-vaadates”, leppides lootusega, et “äkki mind see ei taba”?! Tabab kindlasti! – kui sa pole hakanud “üheks neist endist”! – võimupiruka tükikesse klammerdunud isendiks.
Kas OLEKS VAJA edasi elada?
Eelnevast ei ütlekski nii selgelt, et mu elu nii väga “vajalik” oleks?! Kuid olen veendunud: ka vähestest on abi, ka ainult ühest! Ja ega ma enne koolegi, kui selle ÜHE LEIAN. “Liikumis-mudel” areneb minutagi: olen seda täheldanud Fortes, milles nii mõnigi “uus” vaatevinkel – meenutab nii armsalt seda 1905-nda aasta “elektroni kinemaatikateooriat”, koos “rahunenud, ilma Suurte Paukudeta” statsionaarset Maailmapilti. Suisa tobedalt tore, et seda kinnitab viimaste aegade kvant-teooriagi!?
“Aeg antud elada, aeg antud surra” – hemingveilikus aktuaalsuses.
Loodolendina tean: minu elu ei pikenda (lühendab ehk küll!) mingi minu isiksuslik soovunelm või tegevuski. Küll aga tajun, et vaimses kooskõlas elu – kestab otstarbekohasusega seotult täpselt parajuse kestvusega. SEDA SOOVIN KÕIGILE!
Paradoksaalselt sobitub eelnevasse mul lapsepõlvest pähejäänud Ostrovski tees: “Zitj nado tak, schtobõ ne-bõlo-b boljno za bestseljno prozchitõje godõ…”!
Vähemuste vähemusest
Arvamus
Vaatasin eileõhtust “Vahelevõtjat” – narsin nabani, kuid siis jäin mõttesse: miks ei naernud minuga koos vaatav “puberteedi-eelne” tütretütar? Küsis vaid, kas need “kondid” ikka tõelised on. Arvasin, et vast on mulaaz*id?!
Süz*ee.
Psühhopaadist ema ja turvamehest poeg tapavad valikuliselt rikkaid abituid vanureid, kasutades selleks ema “sündinud soovi – inimesi aidata” ja poja juurdepääsu nii vanurite taustauuringuiks kui “jälgede peitmiseks” hilisemas uurimises.
Naljast, mida mina naersin.
Vahelevõtja on nii loodud isikuna kui seriaalina üpris huvitav, näidates ikka ja jälle juba kord sooritatud kuriteo hävituslikku mõju teostaja isiksusele ja mõtteilmale, mille uurija küll koheselt intuitiivselt “ära tabab” – kuid on kohustatud ka tõendama. Selleks “laskub” uurija ülekuulatava tasandile, justkui vennastudes temaga, ning alles lõpus, püändina, annab hävitava löögi. Senimaani oli “vahelevõtjaks” vaid naisuurija – edukalt ja, vaat et pea rutiinseltki, “tillist tõmmanud” nii mõndagi kavalpead.
Seekord on olukord aga muudetud sedavõrd groteskseks, et naisuurijal laskuvad käed abitult rippu: asitõendid on pahatahtlikult rikutud, kuid ainus tunnistaja, endine uurija, on “muutunud kõlbmatuks” – esinemaks kodanlike vandekohtunike ees – ta muutis end “naiseks”. Vähe veel sellest: ta muutus – “lesbiliseks naiseks”!? Naerukoht: “Ega siis inimene ise ei muutu, kui end füüsiliselt muudab; ega ma siis ainult naisena end elu aeg ei tundnud, vaid ma olin juba mehenagi lesbi!?”
Naljast relvana.
On üldtunnustatud tõde, et “nali tapab”. See kehtib eriti”väärikuse” ja väärikate kodanlaste peal, kes on saavutanud mingi “positsiooni”. Eriti ja eraldi on nali aga tappev poliitikule, kes töötab mingis riigiametis. (Läänes on näiteks prokuratuurgi valitav.) Naeruväärseks muutunud poliitikut ei võeta enam tõsiselt (millega ma ei püüagi väita, et neid ülepea peaks tõsiselt võtma!) – seetõttu on nad sunnitud kas ise lahkuma või nad vallandatakse.
Vähem on vaadeldud nalja rolli poliitpropagandas või siis nö. populistlikes sisendeis, “rahva lollitamisel”. Poliitikutega on asi selge: naeruvääristada vastasparteid ja selle liikmeid. Kuidas aga lollitada rahvast, jäämata ise tolaks? Vaat siinjuures saavutaski see süz*ee oma teravmeelseima “töövõidu”!
Moraalituse sund-propaganda EL poolt:
On üldteada tõde, et “loodus tühja kohta ei salli”. Seetõttu ongi jäänud kõige haavatavamaiks need rahvad, keda ajupesti aastakümnete vältel selle “võitleva ateismiga”, hävitades viimasedki riismed rahva vaimsusest ja idealismist. Nõrgimaiks said Lutheri ja Kalvinigi poolt kaasa-haaratud rahvad, kellede jaoks Jumala Sõna võis tõlkida ja tõlgitseda juba kes-tahes, kel vähegi viitsimist oli. Eesti näiteks suisa uputati üle Soomes tõlgitud Piiblitega, millede sobimatust meile näitab juba see, et neis “Issand” on asendatud kupjaga, nimetusega “Isand”?! Ainsaks erandiks oli ja on jäänud katoliiklik Poola. (Kuid see ei ole praegu asjakohane.)
Tolerantsuse nimetuse all püüab Euroopa meid õpetada, aidata ja suunata: Raha peab olema üks; neegreid peab sõimama “mustadeks”; moslemeid/muslemeid ei tohi ülepea mainidagi ehk “Allahi nime ei pea sina suhu võtma!”; vaja on tuua tänavaile alasti libud, punased ja lillad; me ei tohi kordagi kaitsta omaenda rahva tava-arusaamu, teadlikkust, maailmavaadet ja moraali, ei suusõnal, ajakirjanduses ega Internetiski – saamata kas noomida või karistadagi E-Volinike käest, kes välismaiste järelvalvaja-kupjaina meile kukile on toodud. Nii ametiasutustes kui ajakirjanduses. Poliitpropaganda – meie moraali hävitamiseks – süveneb.
Loodan, et käesolev satub kellegi ajupestud kupja silme alla: andes laiema kõlapinna siis juba RAHVUSLIKU EETIKA PINNAL VÕITLUSEKS!
Vaat nüid, mis sai sellest muhelemapanevast süz*eest, kui seda sügavuti vaatlema asusin?! Polegi nii naljakas ühti!
Eugeenika Eesti tegelikkuses.
Peter Watsoni „Kohutav ilu.“ järgides.
Aktuaalsusest.
Intelligentsi vaimse hävitamise otstarbekus – eugeenika-liikumises { EL }– on mistahes valitseva grupeeringu või üksikisiku esmaülesanne, ilma milleta see liikumine ei saaks eksisteerida.
Haritud ühiskonnakihi blokeerimise sihituslikkus saab ilmseks, kui süsteemselt jälgida Maailmavaatelisi võltsinguid, mida ikka ja jälle rakendavad võimuletrüginud grupeeringud – kasutades klassikalise demagoogia atribuutikat: dialektikat, kui „antagonistlike“ (teineteist välistavate!) Ilmavaadete asemele topitakse „dialektika“ (vastavad: dialektiline materialism; dialektiline idealism). Terviklike Ilmavaadete lõhkumiseks „kõlbavad“ aga ka suisa kõlvatud meetodid: näiteks „teaduse dialektiseerimine“, millest iseloomulikeim ongi nn. Suure Paugu eshatoloogiline heuristika. Lihtsamalt: midagi ei olnud Enne – ja kõik arenes isetahtsi, igavese suure mürinaga – ja see tuleb paratamatult (ikka ja jälle); Päike kaotab oma sära – ja Ilma ootab paratamatu entroopiline soojussurm; väikerahvad kaovad assimileerudes suur-rahvuste sekka – ja KÖÖGA!
Primaarne: on perekonnaõiguse selline moonutamine, millega „ühineksid“ rahvamassid ning pärast mida – enamus enam „ei lubagi“ sellist moonutust likvideerida, takistades tõhusalt normaalse demokraatia loomiskatseid. Kas Eestis on see esimene „kriteerium“ täidetud? Ilmselt: sest kui siiani vaid „täideti lolle vene seadusi saksa täpsusega“, siis nüüdseks on jõutud juba Krupskaja „Naisküsimuse“ NLKP dekreedist „edasi“ minna – tõhustamaks veelgi ühiskonnavastaseid meetmeid – „riiklikus lastekasvatuses“ („-kaitses“). Paternalismuse (isakese-armastuse!) drastilisima vormina: eesti perekond mitte üksi ei viitsi, ei taha, vaid ka ei oska (!) enam omi lapsi kasvatada, oodates „juhiseid“ ja „toetusi“ Riigilt, enamuses KOV võimukailt ametnikelt. A(A)K-de, KOV ja kohtute Süsteemi tõhustamist õigustatakse erandlike perverssustega ühiskonnas.
Teisene: on toimiva ühiskonna omakaitse-võime blokeerimine või koguni hävitamine.
„Tänastes uudistes“ läbib aktuaalsena teema: 30 000 inimese „erakorralise psühhiaatrilise kontrolli läbiviimine“, et need inimesed ikka võiksid relva omada?! Otsustavad selle: 101 isikut, kes teadlikult – ei ole läbinud psühhiaatrilist kontrolli – või varjavad selle tulemusi!? Elementaarseimat küsimust: kumb on rahvale ja riigile ohtlikum, kas üksikisiku „varjatud vaimuhaigus“ või rahvaesindaja (ametniku, võimukandja) paranoidaalne psühhoos? – ei esitata!?
Ohtu on pandud mitte üksi ühiskonna omakaitseline võimekus, vaid koguni Kaitseliidu eksistents ja mõttekus! Ja kõike seda on „julgetud“, hoolimata kurvast ajaloolisest kogemusest: vapside relvitustamisest ja jälitamisest, kuni kriminaalkurjategijaiks tembeldamisega!? SEE oli, mis võimaldas Pätsi-Laidoneri terrorlikul diktatuuril võimuletuleku – ja seadis Riigi iseseisvuse sõltuvusse – üksikisikuist, mõningal määral ka korporatiivseist grupeeringuist.
Kolmanda kriteeriumina tulenebki eelnevast: 101 rahvaesindaja asendamine väiksema „enamlusega“, olgu selleks siis pajuvenelased või oligarhia (Eestis, tõsi, armetukene). Parlamentaarse riigikorra asendamine presidentaalse või ainuparteilisega – SEE on, mis eugeenika-liikumise peamine eesmärk on, koos üksikisiku täieliku blokeerimisega – ja „rühma seltsimeeste“ võimulepääsuga, olgu nad siis padu-natsistid, -kommunistid, -anarhistid vm. – peaasi, et targemad kui ühiskond!
Iseloomulikemaid meetodeid – rahvusliku intelligentsiga manipuleerimiseks: on ärksamate indiviidide „ühendamisponnistused“ mistahes vaadete, ideaalide, nostalgia või koguni rahvuslike usundite alusel. Selliselt tekivad ja paljunevad lõpmatud „Anti-EL“-id, „Anti-eurod“ või koguni „vene-vastased“ grupeeringud. Oluline on – et need ei tugineks mitte mingile terviklikule maailmavaatele! Olles ja jäädes abituiks ideoloogia-rakukesiks – parteide mõjusfääris.
Mis siis edasi?
Edasi on ju teada. Elimineerima peab (kuni eksekuteerimiseni välja!) kõik „Riiki koormav“: vanurid; vigased; vaimuhaiged; vaesed; teisitimõtlejad; – olulisimana aga HARITLASKOND!? LAPSED – RIIGILE! Vanemad, kes peaksid vastu näuksuma – vangilaagreisse! KOGU ELANIKKOND TULEB KRIMINALISEERIDA – ET VÕIM VÕIMUTSEDA SAAKS! Taandareng? Ja mis siis? – niikuini ju Päike kustub kord!?
TONU Otstarbekusest filosoofias
Braani- ja stringiteooria – Einsteini peegelduskatses,
Poincare` Abeli ryhmas, liikumisteisendustena.
1. Alljärgnev
tugineb: Liikumisteisendustele, mis on autori poolt aastakymneid väljapakutud diskussiooniks,
kuid mida nö.akadeemilised ringkonnad ei ole pidanud vajalikuks vötta kaalumiselegi;
: syva-arusaamale hulgateoreetilisest nöudest aksiomatiseeritud arutlusel elementide ja formaliseeritud
tehete hulga operatiivsele alluvusele – valiku aksioomile – nende olemasolunöudele;
: teleoloogilisele nägemusele maailmaruumist, ilmaruumi ja monaadi vastastikuses söltuvuses nende olekust –
nende oma- ja vastastikuses liikumises, samuti kui elementide ja nende koosluse suhtelises energeetilises olekus.
2. Esmalt pyyan kooskölastada iseenda teleoloogilisest maailmavaatest tuleneva nägemuse – Galilei-Newtoni liikumisteisenduste viimisel ruumilisele kujule, eukleidilisele geomeetriale, milles hypoteetilised “syndmused” Minkowski pseudoeukleidilises geomeetrias – on asendatud relatiivsetes ruumides olemasolevate objektide ja nende suhete vaatlusele.
Eristan nö. esimese tasandi suhet – kui relatiivses ruumis asuva ( “mahtuva” ) elementide hulga statsionaarset seisundit -teisesest suhtest, mis kujuneb elementide omavahelisest liikumisest nendele vastavais relatiivseis ruumides, ja
normatiivsetest suhetest, mis on tingitud olemasolevate elementide olekuga (siseenergia, orienteeritus, jne.).
3. Vajadus:
Miks siiski arutlen selles 100-aasatataguses ruumivaatluses, kui juba aastal 1905 – oli välja töötatud teooria,1)*
// “Fizitsheskij entziklopeditsheskij slovarj “, MOSKVA, 1984, lk. 509. //
millekohaselt elektroni relatiivne liikumine “meie ruumis” – oli lahtimötestatav elektroni trajektoori “lähenemisena”
vaatlejale ja elektroni enda “kokkusurumisena” tema liikumise ristsihis. ?
// “… kui tunnistada elektronide elektrodynaamika Lorentz-varianti ja Poincare´pakutud elektroni mudelit,mis surutakse kokku eetri alalise röhu poolt, saab kompensatsioon olema täpne ja relatiivsusprintsiip,möistetav kui vöimatus avastada liikumist eetri suhtes, on täidetud.”//
Sest nn. Lorentz-teisendustele tuginev erirelatiivsusteooria oli ja on kyll sobitatav matemaatiliselt Minkowski pseudoeukleidilisse maailmaruumi, koos nn.”syndmustevaheliste” intervallide eukleidilise käsitlusega neljadimensionaalses Poincare` ryhmas, milles neljandaks möötmeks kujutletakse endile ette mingit imaginaarset “ruumilist(?) vahemaad kahe syndmuse vahel”. Samas me ei saa ettekujutada mingit “syndmust”, kui see ei toimu olemasoleval kehal.
Sest erirelatiivsusteooria muudeti heuristiliseks, vastuväiteid vöi kriitilist vaatlemist mittelubavaks, apooriliseks.
Sest aegruumi taoline imaginaarne eshatoloogia “sobis(-b)” imehästi vöimutseva neodarwinismiga, andes nö. “uususundliku ilmavaate”, mis vöimaldab siiani fanaatilisi maailmaparanduslikke liikumisi, olgu selleks siis eugeenikaliikumine, oma-usundi- hullus, terrorism vöi antiterrorism.
Sest nimelt otstarbekuse kaalutlustel – on möistlikum seada aegruum söltuvusse, ruumi möötva signaali v ja selles ruumis meile antud kiiruse c kohaselt, – kahest ruumidimensioonist, mitte aga pikkusest kiiruse v sihil ja ajast endast.
( Kui on juba eeldatavalt vajalik teooria seletamiseks muuta kahte parameetrit, tuleb teha seda “lihtsamalt” – andes kooskölalise relatiivse kuju kahele, kiirusega v ristuvale, ruumidimensioonile y ja z , seostades nii ruumimöötmed kui suhtelises kiiruses v omavahel liikuvad taustkehad – nende kehade signaaliga möödetavate relatiivsete ruumidega.)
4. MUDEL
Vaatleme Einsteini poolt esitatud peegelduskatset 2)* ruumilisel kujul:
TONU 2 , 20.01.2009
AEGRUUMILISEST APOLOOGIAST
01. Kiirus v ja relatiivsed ruumid .
Vaatleme taustkeha E , kui hulka, milles eksisteerivate omavahel paigalolevate elementide ( samuti kehade, Newtoni möistes ) asukohad on möödetud ruumis R(E) signaaliga u , selliselt et Vaatleja ise määratleb end asuma ( möötjana ) Cartesiuse ristkoordinaadistiku algpunktis O, mingil olemasoleval kehal V taustkehas E .
Olgu meil möödetud mingi teise keha K ( x; y; z ) asukoht taustkehas E ,
nii et VK = OK = r = ut .
Vaatleja V poolt määratletud kolmemöötmelist Cartesiuse ristkoordinaadistikku, oma algpunktiga O-s ja oma kindla möötkavaga, vöime alati kujutleda absoluutse ruumina AR , milles kehtivad ruumigeomeetria postulaadid ja neist järeldustena saadavad teoreemid.
AR alamruume, mis on ” seotud ” mingite taustkehadega E, F, … , nimetame relatiivseteks ruumideks R(u) , R(c) , … , vastavalt neis taustkehades kasutatavale signaalile u , c , … , millega need kehad on möödistatud .
Könekeeli: me vaatleme iga kord alamruume, ” mis meid huvitavad ” ja mis on meile kui vaatlejale möödetavad vastavatel signaalide kiirustel, möeldes selle all ” signaali jaoks reaalset löpmatust ” ehk Vaatlejat huvitavat ajavahemikku, mille kestel see signaal on suuteline vaadeldavas ruumis läbima vaadeldavat ruumiosa.
Taolisi , mittetuhje , alamruume R(u) saab käsitleda hulgateoreetiliselt , määrates neis sisalduvate taustkehade E , F , … , vöimsuste hulgas täieliku järjestuse ( Zermeli teoreem ) . Antud juhul tuleb vaadelda alamruume R(u) kui hulkade E, … alamhulkade hulka P(E) ,
milledes hulkade E vöimsused minoreerivad rangelt hulkadele P(E) ( Zorni teoreem ).
On selge, et ” meie kui vaatleja huvitatus ” – käsitletav kui valgussignaali ulatuvus vaatleja jaoks – reastab / avardab sellise induktiivse järjestuse kuitahes ” kaugele ” vaatlejast, kusjuures taustkehade reaalsest olemasolust tingituna – on köigil neil ” avarduvatel alamruumidel ” vähemalt uks maksimaalne element / hulk , mis minoreerib alamruumina ruumiga R(u) ( ” mahub ” nii ruumi R(u) kui ka vöimsamasse ruumi AR ). Könekeeli vöib väljenduda : R(u) on AR ruumiosa , mille ulatuvus hölmab köik signaaliga u vaadeldavad kehad selles ruumis , koos nende omavahelise asendiga ; koos omavaheliste möödetavate kiirustega ja neist tulenevate ruumiteisendustega .
SEE ON RUUMI HULGATEOREETILINE VAATLUS , KOOS VALIKU AKSIOOMIGA .
Vöib könelda ka nende ruumide ” mahtuvusest ” absoluutsesse ruumi AR ehk :” absoluutne ruum AR mahutab endasse ruumide R(u) “relatiivsed löpmatused” , milles liiguvad uhtlaselt ja sirgjooneliselt mingeil ” meile antud kiirustel v ” taustkehad E , F , … ruumides R(u) paigalolevate taustkehade suhtes, mis on neisse paigutunud vaatlejale V möödetavalt signaaliga u ristkoordinaadistikus , mille algpunkti ja orientatsiooni määrab V “.
Asugu ruumis R(u) , taustkehal E , x-teljel, vaatleja V ja keha K , nii et VK = ut ja asugu ruumis R(u) , taustkehal F , kiiruse v suunal, x-teljel, vaatleja V* ja keha K* , nii et V*K* = ut .
On selge, et löikude VK ja V*K* otspunktid V , K , V* ja K* kuuluvad taustkehadena vastavatesse hulkadesse E ja F , olles nende alamhulgad , ” esindades neid relatiivses ruumis R(u) ” . Samas : signaaliga u möödetud vahemikud VK ja V*K* on ruumide
R(u) alamruumid , niiöelda – ” esindades neid ” , andes teavet ( meile, vaatlejale, … ) nende alamruumide meetrikast, orientatsioonist ja omavahelisest relatiivsest liikumisest – konkreetses V koordinaadistikus .
Selliselt esitatud taustkehade kohta vöime kusida : kuidas näeb vaatleja V liikuvat taustkeha V* ? – antud juhul : kuidas möödab vaatleja V löiku V*K* igal ajahetkel t , mingist alghetkest t = 0 , mil vaatlejad asusid uhtselt kohal O ?
Sellele kusimusele vastas Newton nn. Galilei-Newtoni teisendustega sihil x kehal E :
VK = ut ; V*K* = ut ;K ( x; 0 ) ; K* ( x`; 0 ) : x` = x – vt ,
kui x = ut , siis x` = ut – vt ,
— ja sellisel kujul kehtivad need teisendused MÖLEMAL TAUSTKEHAL E ja F SAMASELT .
Mitte keegi ei ole sellisel kujul neid teisendusi umber lukanud, ei saagi lukata , ka mitte erirelatiivsusteoorias , sest need loodi nimme Zenoni apooriate umberlukkamiseks ega ole intuitiivses loogikas vaieldavad , seepärast vötangi need oma arutluse aluseks.
( Vt. Paul Kard , lk. 41 : ” Väljaspool kahtlust on nuud see, et signaalide kaugused vaatlejast on sel hetkel töepoolest c + v ja c – v . See on töesti endastmöistetav ja mitte mingisugune relatiivsusteooria ei saa selles midagi muuta. Aga väide, et signaalide kiirused on vaatleja suhtes
c + v ja c- v , on hoopis midagi muud. ” ).
02. Ruumiteisendus-funktsioonid .
Asugu E ja F taustkehadena mingis ruumis R(u) , milles vöib liikuda veel mistahes teisi taustkehi. Väidame, et vaatleja V taustkehas E möödab ruumi R(u) teisendusega f ruumina f ( R(u) ) , muutes köiki vahemaid selles ruumis vastavalt (meile antud ) kiirusele v , ja konkreetselt
taustkeha E – ” teiseneb kujule F ” , ja F – ” taastub kujule E “, vastavalt teisendus-funktsioonile f ja pöördteisendus-funktsioonile g : f ( E (x) ) = F (y) , y = f (x) ; g ( f ( E (x) ) = E (x) ; g (y) = g ( f (x) ) = x .
02.01. Kiiruste liitmine .
Klassikalises mehhaanikas kehtib samasihiliste kiiruste teisendusvalem kujul : u` = u – v ,
milles u on keha kiirus mingis inertsiaalsusteemis ja u` – sama keha kiirus, möödetuna teises inertsiaalsusteemis, mis liigub esimese suhtes samasihilisel kiirusel v .
Seda nimetatakse ka kiiruste liitmise valemiks.
02.02. ” Lähenemine ja eemaldumine ” – kui ruumiteisenduse vastandfunktsioonid (additiivsel kujul).
Sellisel kujul esitatuna on kiirused u ja v samasihilised ning möödetakse vaatleja V poolt V* teekonda ehk “lähenemist vaatlejale V ” teisenduse kujul f (v) :
f ( ut ) = ut – vt = ut ( 1 – v/u ) ;
pärast “möödumist” vaatlejast V , mil V* kiirusel v on hetkeliselt vaatleja asukohas O , muutub keha liikumine ” eemaldumiseks”
ning f( -v) : f(-) ( ut ) = ut + vt = ut ( 1 + v/u ),
koos sellekohaste vastandfunktsioonidega f(-) ning g(-) : g(-) (ut) = ut / ( 1 + v/u ) .
Tarbetu olekski seetöttu alati pöhifunktsioonide eristus kujul f(+) ja f(-) – see ei muuda teisendust ennast.
NB ! Ruhm – on uheoperatsiooniline hulk : kas liitmistehtega , mispuhul me räägime aditiivsest Poincare` ruhmast ja teisendusfunktsiooni vastandfunktsioonist ; vöi korrutustehte/komposiidiga , mispuhul meil on tegu Poincare` multiplikatiivse Abeli ruhmaga ja me räägime pöördfunktsioonist
( kui pöördteisenduse funktsioonist ) .
Nimelt seda röhutasin oma eelneval lehekuljel : kiiruse märk – ei muuda teisenduse olemust ( multiplikatiivset : korrutamist / jagamist / järjestrakendamist ) ega tema funktsiooni märki, vaid iseloomustab Vaatleja ja liikuva keha omavahelist asendit , meid huvitaval ajahetkel. Nimelt selles seisneb ka nihke / lukke eripära : mingi liikumise kirjeldus ei söltu vaatleja asukohast liikuva keha suhtes, kuivörd ja ainult vaadeldava liikumise enda olemusest, kiirusest, kujust vöi nende muutusest ( see on omane köigile funktsionaalsetele vastavustele) .
On selge, et signaali u enda kiirus u ei muutu, ei ” lähenemisel ” ega ” eemaldumisel ” :g ( f (ut) ) = 1 ; ja g(-) ( f(-) (ut) ) = 1 .
On kerge näha, et Lorentz-faktor tekib väärast teisendusfunktsioonide rakendusest : f ( f(-) (ut) ) = 1 ? .
Sisuliselt on siin tegu : funktsiooni ja vastandfunktsiooni geomeetrilise keskmise leidmisega – ja puudega seda rakendada kui teisendusfunktsiooni .
( Selline – signaali u ja tema kiiruse eristamatus antud arutluses – on sihituslik, röhutades signaali absoluutsust kehal E ruumis R(u) . Nii nagu mistahes paigalolevas koordinaadistikus – on absoluutne ka selles ruumis meile etteantud kindel kiirus v – igal taustkehal selles ruumis eraldi . )
02.03. Ruumiteisendus kiiruse v ja raadiusvektori r vahelise nurga a korral .
Arutleme , kuidas teiseneb ruumis R(u) taustkeha E koordinaadistik
K ( x; y; z; ) kiirusel v liikuva vaatleja V* jaoks ?
Vaatleja E-s on möötnud mingi teise keha asukoha E-s kui K ( x; y; z; ) kohalt V / O ( 0; 0; 0;) signaaliga u .( Seda vöib vaadelda kui sundmusi : u saatmist kohalt O ja kättesaamist kohal K .) Selle keha kaugus vaatlejast VK on r = ut . / Vrdl. Poincare` “syndmustevahelise intervalliga” ! /
Olgu alghetkel t = 0 vaatlejad V ja V* koos kohal O taustkehal E ning moodustagu nende omavaheline kiirus v löiguga OK ( kui raadiusvektoriga r ) nurga a .
Vaatleja V* möödab Galilei teisenduste kohaselt sihil x toimuvaid kiirusi u ja v kui kiiruse u x-komponendi ja v samasihiliste kiirustena ning teisendab : x` = x – vt ; x` = ut cosa – vt .
Vaatlejale V* näib samas löik OK “luhemana” , nii et kui r = ut, siis: r` = ut – vt cosa .
Mölema relatiivse ruumi eukleidilisusest järeldub, et kiiruse v risttasand teiseneb homoteetselt sihiga x , vastavalt homoteetsusteguriga, mis on erirelatiivsusteooriast tuntud kui “gamma” ,
Lorentz-faktori (&) , ” pöördfaktor 1 / (&) ” , nii et :
y = ut sina ; y` = ut sina / (&) .
( Loeme : homoteetsustegur “epsilon” – on Lorentz-faktori “gamma” pöördvördeline tegur . ) ja y` = y / (&) ; z` = z / (&) .
02.03.01. Funktsiooni keskmistamise näide .
Paul Kard ( lk. 36 ) , selgitades Michelsoni katse olemust .
Vaadeldes : ” Maa absoluutset kiirust v ” – ja sellega ristuva signaali c liikumist edasi-tagasi peegeldumisel – signaali ja kiiruse vektorkujul : ta viib signaali c uldise teisenduse,
c` = c – v , kujule c = c` + v , nii et vörduse mölema poole ruutimisel saame ( vektorite ristseisust ja -arvutusest ) ruumilise ristmöötme : c`t (&) = ct , ehk c`t = ct / (&) .
02.03.02. “Pseudoeukleidilisuse .eukleidilisus” ?
O.Silde ” Relatiivsusteooria pöhikusimusi geomeetria valguses ” , ” Valgus ” , TALLINN 1974
Lehekulgedel 60 – 62 esitab autor ( uhena väga vähestest teadlastest , kes ei ole veel kaotanud oma völuvat lapsemeelsust ! ) …möttelise katse , kusides : ” Kuidas on lugu eseme möötmetega risti liikumise suunaga ? ”
Mötteliselt paigutab O.Silde ” rongi algusse valgussignaali saatja, sidudes rongiga jäigalt peegli, mingil kaugusel ct sellest saatjast, ristsihis rongi liikumiskiirusega v . Kuulsas ” Einsteini rongis ” tähendab selline katse : vedurijuhi poolt liikuval rongil – rongi körguse möötmist – ja selle möötmise vördlust raudteetammilt .
O.Silde – on juba rakendanud rongis kiiruse v sihilist peegeldusteisendust , järeldades sellest pikkuste kontraktsiooni ja aja dilatatsiooni, – olles ja jäädes seega pseudoeukleidilisse ruumi ,
– järeldab aga ruumi eukleidilisusest, et ristsihis rongi möötmed ei muutu . (?)
02.03.02`. Lähenemine , vastasseis ja eemaldumine .
Matemaatiliselt on töepoolest vöimalik arvutada paralleelluket teisendusena, mil vaatlejad V ja V* asuvad mingil alghetkel t = 0 , koordinaadistiku algpunktis
O , ja nad mölemad möödavad samaaegselt nii keha K kui ka K* asukoha kaugust vaatlejaist, kui r on risti kiirusvektoriga v . Selleks vaatleme ajavahemikku t suurusena r = ut , t = r/u .
“Lähenemist” vaatleme kui K* asumist signaali saatmise alghetkel abstsissil x = vt , teisendusena ;
“Vastasseisuna” K*( 0 ; f(ut) ) , sundmusena signaali jöudmine kehale K* ajavahemiku t möödumisel ;
“Eemaldumisena” aga sundmuse, peegeldunud signaali tagasijöudmine vaatlejale, teisendusena .
Säilitades signaali u kiiruse ja kiiruse v suurused koordinaadistikes VK ja V*K* , vöime koordinaadid y ja y* töepoolest avaldada Lorentz-faktori kaudu :
( Meie eelnevas arutluses, teisenduses f (ct) , punktis 02.03. , on 🙂
cosa = 0 ; sina = 1 ; nii et x = 0 ; y = ct ; r` = ct ; x` = – vt ; y` = ct / (&) .
02.03.03. Kosmoloogiast .
Kosmoloogias tehakse köik arvutused absoluutses ruumis lubatavate matemaatiliste tehetega, eshatoloogilises veendumuses, et MEIE LIIGUME , mingil omakiirusel v , kuid samas me justnagu vöiksime lugeda endid paigaloleva vaatlejana – teisendades end umbritsevat .
Olgu, me liigume siiski, kuid see PEAB OLEMA MEILE ENDILE KA NÄHTAV ! MÖÖDETAVANA .
Mina oletan, et selline nähe ON OLEMAS, KUI … Hubble` konstandi vördelisust kaugusega meist ( ASTRONOOMILIST PUNANIHET ) – TÖLGITSEDA DOPPLERI RISTEFEKTI KAUDU – KUI MAA PÖÖRLEVAST / TIIRLEVAST OMALIIKUMISEST TEKKIVAT “KAUGE RUUMI” – “LÄHENEMISENA MAALE “, ( ruumi enda RISTHOMOTEETSE TIHENEMISENA , teguriga ( 1 / (&) ) .
See on nö. teist järku efekt , vörreldes liikumisteisendustes f ja g sisalduva suhtarvuga v / c .
Siit saab järeldada, et arvutuslikult punanihe ON mitte uksi vörreldav , vaid ka määrav , vörreldes tähtede nö. omaliikumisest tingitud efektidega – kaugete tähtedega seotud ruumis R (c) .
Seega : MAA KOGULIIKUMINE mingil hetkkiirusel v , PIISAVALT SUURES RUUMIS R(c) ON VÖRRELDAV VALGUSSIGNAALIGA ning on möödetav Doppleri ristefektist tuleneva punanihke suurusega, mis avaldub KAUGUSTEGA VÖRDELISES HUBBLE`I KONSTANDIS .
NB ! Oma arutluses möönan, et valgussignaali kiirus c on invariantne relatiivsetes ruumides, kuid ei tunnista c nö. absoluutsust, kui suurimat kiirust Looduses ! Nimelt seetöttu tähistangi oma teisendustes mistahes signaali ja tema kiirust “u”- na – see on sihituslik, sest minu poolt vaadeldavad teisendused – VÖIMALDAVAD valgussignaalist kiiremat kiirust !
Samas ma ei väidagi, et selline signaal oleks Fuusikule möödetav
( kaasaegsete signaalide kasutamisega ) , kuid eeldan, et nii sellise signaali KASUTAJA kui ka efektid sellest – on meile ANTUD , meil tuleb vaid seda MÖISTA ! Lahtimötestada Hubble`i punanihke olemus :
MISTAHES LOODU ENESEKORRASTUSLIKU ALALHOIDLIKU LOOMUSEGA , millesse on sisse kodeeritud piirangud muutustele ja selle kontrollile signaali abil .
On selge, et c kiirema signaali valdaja saab kontrolli LOODU ULE, kuid ilmselgelt ei tohi ega saa seda suvalt kasutada . OLETAN ,et MÖISTUS
( vrdl. muinasjutulist : kiire kui möte ! ) on meile KINGITUSEKS antud – ja see ei ole möödetav meile kättesaadavate vahenditega materiaalsete signaalide abil .
JÄRELDUSENA MA EI NÄE nö. Jumala-töestust, kuid VÖIMALUST JUMALA OLEMASOLUKS – JA TEMA TOIMIMISE ATRIBUUTIKAKS SIGNAALIGA “kiirem kui c ” – aga kyll.
A pro`pos : vrdl. pseudoeukleidilises geomeetrias kasutatavat ” sundmustevaheliste intervallide s ” neljandat , IMAGINAARSE MÖÖTMEGA , möödet x(0) .
See – ei ole nö. valgussignaaliga uhilduv, kull aga on ETTEKUJUTATAV kui VALGUSSIGNAALI KÄITUMISE REEGLISTIK – ABSOLUUTSES RUUMIS , möödetav relatiivses ruumis .
Selline reeglistik ei ole kuidagi seotud mingi materiaalse substantsiga, mis justnagu peaks sisalduma, eetrina, absoluutses ruumis, kuivörd LOODU ENDA OLEMASOLUGA ja VAATLEJAGA, kes ise on reaalselt eksisteeriv – olemasolevas ruumis olemasoleval taustkehal. ( Siinjuures ongi paslik naeruvääristada Einsteini postulaati taustkehade olemasolu ebavajalikkusest (?!) – kuivörd saabki tösiselt vötta signaali, millel puudub nii saatja kui ka vastuvötja, on vaid mingi kiirus, millel omakorda puudub olemasolev kandja, kuid siiski on omaenda piirangud ??
Ei saa eitada muidugi mingite selliste virtuaalsete signaalikandjate olemasolu, kuid valgus seda ilmselt ei ole, niikui pole möeldav ka sellise signaali “nägemine” .)
02.03.04. Lorentz-ruhmast Poincare` ruhmani .
Pöördume venekeelse fuusika-sönaraamatu poole ( lk. 510. ) , taipamaks :
kuidas on “erirelatiivsusteoorias sobitatud” Lorentz-teisendused Poincare` ruhma ?
a) = Lorentz-teisendused (2) , koos pööretega umber koordinaatide alguspunkti, moodustavad Lorentz- ruhma ; lisandades sellele ajalised ja ruumilised nihked t` = t + a ja x` = x + b ( milles a, b – on vabad konstandid aja ja pikkuse möötuhikuis ) saame Poincare` ruhma . = ……………………
b) = Poincare` teisendused jätavad invariantseks suuruse, mida nimetatakse
intervalliks s(AB) ,sundmuste A ja B vahel, mis on määratud
vastavusega : (6) .
Matemaatiliselt s invariantsus on analoogne vahemaade invariantsusele eukleidilises geomeetrias . Suuruseid ct , x , y , z vöib vaadelda kui sundmuse nelja koordinaati neljamöötmelises Minkowski aegruumis :
x(0) = ct , x(1) = x , x(2) = y , x(3) = z , mis on neljamöötmelise vektori koordinaadid .
Matemaatika vaatevinklist erirelatiivsusteooria on Minkowski aegruumi geomeetria .
( Kui x(0) asemel tuua sisse imaginaarne koordinaat x(4) = i x(0) = i ct , siis mistahes Poincare` teisenduse vöib kirjutada kujul, mis on täielikult analoogne valemile , millega kirjeldatakse pöördeid ja nihkeid kolmemöötmelises ruumis .)
Selle tulemusena , et ajaliste ja ruumiliste koordinaatide vahede ruudud kuuluvad vastavusse (6) erinevate märkidega , intervalli s ruudu märk vöib olla erinev, sellise ruumi geomeetria erineb eukleidilisest ja nimetatakse pseudoeukleidiliseks . =
02.03.05.Tautoloogiline sobitus .
Miks siiski vaatlen sellist arutlust ” tautoloogilise ebaotstarbeka sobitamisena ” ?
a) Esiteks : Lorentz-teisendused – on ise Galilei teisenduste ruumiline umberkirjutus, homoteetsusteguriga Lorentz-faktori kujul. Seda on kerge näha, kui jagame Lorentz-teisenenud koordinaadid ( köik kolm ) Lorentz-faktori väärtusega , saades meile juba tuttava ruumiteisenduse f (ut) kuju, kiiruse v sihil. Meil kirjeldatud nn. raadiusvektor on analoogne Poincare` intervallil s(0)-koordinaadiga .
b) Teiseks : Otstarbekuse kaalutlustel ruumimöötmete teisendamisel :
Koordinaadistiku korrutamisel Lorentz-faktoriga – muudame nii pikkust kui ka aega ;
selliselt teisenenud koordinaatide jagamisel L-faktoriga – taastub ruumigeomeetria eukleidilisus , muutub ainult liikumise ristmööde ,
ja koguni intervall s saab tavapärase mötte : kui sundmuste
A ja B toimumiste vahekaugused ruumis R(u) ( söltumatult nende kauguste möötmisest erinevailt taustkehadelt E vöi F ) .
c) Kolmandaks : Lorentz-teisendused moodustavad kull ruhma, kuid see ei ole Poincare` ruhm ( nihe ei ole multiplikatiivne teisendus ).
d) Neljandaks : Galilei teisendused vöimaldavad, lisaks pööretele, teisenduste multiplikatiivset järjestrakendamist .
02.04. Valguse aberratsioonist .
On teada, et vaatleja V jaoks cosa = x / ut . Kusime : milline on teisenenud nurk a` ?
Eelnevast saame : cosa = x / r ;
f (cosa) = f (x/r); cosa` = x`/ r` ; cosa` = ( x – vt ) / ( ut – vt cosa ) .
Vöime kirjutada :
cosa` = (ut cosa – vt) /( ut – vt cosa ); cosa` = ( cosa – v/u ) / ( 1 – (v/u) cosa) .
Kui valime u = c , saame erirelatiivsusteooriast tuntud :
cosa` = ( cosa – v/c ) / ( 1 – (v/c) cosa) .
sina` = sina / (&) ( 1 – /v/c) cosa ) .
( Vt. : Paul. Kard. lk. 68. toodud cosa` ja sina` ( valemid (17.17.) ) valgussignaali c jaoks .)
SELLISELT TEISENENUD NURKA a` saab tölgendada signaali (valguse kiiruse)komponentide teisenemisena kui c cosa` ja c sina` ja seda NIMETATAKSE ULDISELT VALGUSE ABERRATSIOONIKS .
// Märkus: Antud arutlus annab ” valguse aberratsiooni ” nö. ruumilistes teisendustes ” , muutes mingi löigu VK möötmeid ja ruumi R(u) koordinaadistikku, – KUID EI MUUDA MEILE ANTUD KIIRUSI u ega v endid , omavahelises kiiruses olevais taustkehades ( eraldi, milles nad on meile määratud / antud – ka vektoriaalselt ).
Antud arutlus loeb tautoloogiliseks erirelatiivsusteooria manipuleerimise ajaga, mis juba oma olemuselt toob kaasa nii signaali enda kiiruse c kui ka V poolt möödetud kiiruse v muutumise teisenduste käigus ( Vt. nn. kiiruste liitmist, milles muutuvad nii u kui v – ja ainult kui … (?) signaal u ( kui teine kiirus koos v -ga ) ” läheneb” valguse kiirusele c – saab valguse kiirus c kätte oma identiteedi : kindla kiiruse teisenduse-pöördteisenduse järjestrakendamisel esialgselt möödetud taustkehal . //
03. OTSTARBEKUSEST.
Tagantjärgi saab vaid hämmastuda ebaotstarbekohaste ideede vöidukäigu ule relatiivse liikumise kirjeldamisel, niisamuti kui erirelatiivsusteooria “lihvijad” ei taipa :
milleks oli Newtonil siiski vajalik postuleerida absoluutse ruumi olemasolu ?
( Kui ometi saavat ju läbi ka suvaliste , tuhjade, ilma reaalselt eksisteerivate taustkehadeta, relatiivsete ruumidega – inertsiaalsusteemide nime all ?! )
On tösi, et Lorentz-teisendused olid loodud, enne kui Albert Einstein andis oma nn. kaks pöhiprintsiipi, mötestamaks lahti nende fuusikalis-ruumilise sisu , kuid need kehtisid kui elektromehhaanilised teisendused KINNISTES JUHTIDES , milles liikumise vabadusaste on ilmselgelt piiratud nimelt ristsihis – juhi pikimöötmega . ( Vördl. elektrivoolu “sooviga” liikuda juhi välispinnal … ja oma “sooviga” lahkuda taolisest piirangust, avaldades seda oma möjuga umbritsevale ( vaatlejale ) nn. elektromagnetvälja levikuga umber juhi . )
On iseloomulik, et samal ajal (1904. – 05.) oli nimelt Lorentzil endal ja Poincare`l, alates Freznelist, loodud teooria nii kinemaatika-seaduste “iseeneslikust” kompensatsioonist absoluutses ruumis mingi kiiruse v omandanud vabade kehade liikumisel kui ka vabade laetud osakeste relatiivse liikumise jaoks, mis näitas , et muutuvad mitte uksi ruumilised koordinaadid kiiruse v ristsihis, tagamaks signaali c invariantsust , vaid ka elektron ise “surutakse kokku” (Vrdl. kaasaegsete katsetustega nn. stringiteooria loomisel ! ) . Selle teooria täpne vastavus relatiivsusprintsiibiga – ja pöhjendusega : liikuvas susteemis endas mööta omaliikumist absoluutse ruumi suhtes – hämmastabki TONU`t, kusimaks : milleks oli Einsteinil siiski vajalik postuleerida absoluutse ruumi olematus ??
03.a. Tölgin löike venek. teosest :
” Fizitsheskij entziklopeditsheskij slovarj ” , MOSKVA , ” Sovetskaja entsiklopedija ” , 1984
Relatiivsusprintsiip ja teised jäävusprintsiibid. Erirelatiivsusteooria teke . lk.509. lg. 1 . ”
= Relatiivsusprintsiibi universaalse öigsuse tunnetus mistahes fuusikalistes nähtustes – on keerulise ajaloolise arengu tulemus . 19-ndal sajandil loeti, et relatiivsusprintsiip kehtib ainult mehhaanikas, kuid on ebaöige optikas ja elektrodunaamikas, kuna kujuteldi ilmseks, et elektromagnetlained ( sealhulgas valgus ) – see on lainetus erandlikus keskkonnas – eetris, mis täidab kogu ruumi ja mis määrab ära privilegeeritud taustsusteemi, mis on eetri suhtes paigal, ja milles ainsana kehtivad optika seadused ja elektrodunaamika vörrandid . Näis ilmsena, et kehade susteemis, mis liigub eetri suhtes, optilised ja elektromagnetilised nähtused ilmnevad teisiti, kui liikumatus, kuid köik katsed avastada selliseid nähtusi, mis vöeti ette 19. sajandil ja 20. sajandi alguses, ebaönnestusid. Ebaönne selgitust otsiti, alustades prantsuse fuusikust
A. J. Fresnel`ist, dunaamikas : kasutades konkreetseid dunaamikaseadusi, mis olid määratletud eetri paigaloleku susteemis, näitasid, et antud kehade susteemis efektid, mis on seotud liikumisega eetri suhtes, kompenseeritakse. See programm sai tuntud löpetatuse hollandi fuusiku H. Lorentz`i ja prantsuse matemaatiku H. Poincare` töödes (1904 – 05), milles oli näidatud, et kui tunnistada elektronide elektrodunaamika Lorentz-varianti ja Poincare` pakutud elektroni mudelit, mis surutakse kokku eetri alalise röhu poolt, saab kompensatsioon olema täpne ja relatiivsusprintsiip, möistetav kui vöimatus avastada liikumist eetri suhtes, on täidetud. 1905-ndal aastal olid Poincare` töödes uuritud liikumisteisenduste ja pöörlemisteisenduste ruhmaomadused vaatleja seisukohalt, kes on eetris paigal. Uleminek kaasaegsele vaatenurgale, millekohaselt absoluutselt tuhjas ruumis ei saa määratleda paigalolevat taustsusteemi ja köik seotud inertsiaalsusteemide liikumisteisendused on vördväärsed, oli tehtud Einsteini poolt 1905-ndal aastal . Tema töödes oli arendatud järjekindel teooria aja ja ruumikoordinaatide möötmisest inertsiaalsusteemides ja avaldatud relatiivne aja aeglustumise ning möödete luhenemise iseloom. Teooria matemaatiline aparatuur oli arendatud saksa teadlase G. Minkowski poolt 1908. aastal. =
03.b. Kahest pöhipostulaadist relatiivses liikumises .
Kaasajani on puutud tasakaalustada kunagi tehtud mööndusi relatiivsusteoorias, minnes kaudseid teid pidi, ule ja umber, nende pöhipostulaatide, sest teisendused, nagu me nägime, praktiliselt uhtivad nii erirelatiivsusteoorias kui ka käesoleva arutluse raames, nende sisu ja möte aga on risti-vastupidised.
Pöhipostulaatidest tehtavad järeldused vajavad ilmselt aeg-ajalt ( 100 aasta-tagustki ! ) maailmavaatelist revideerimist / reinstallimist , sest need tulenevad otseselt, söltumatult teisendusfunktsioonide kujust , postuleerimise ajal valitsevast ilmavaatest .
Halb on, kui akadeemiline arusaam postuleeritavatest möistetest hakkab iseennast pidama heuristiliseks, mis keelab teistsuguse vaatenurga . Halvem veel, kui see takistab mitte niivörd postulaatide endi revideerimist, kuivörd nende lahtimötestamist teisel tasandil, mille järeldused “ei meeldi” , kellelegi .
Eraldi tuleks röhutada N. BOURBAKI koolkonna poolt juba möödunud aastasaja 60-ndatel aastatel esitatud MATEMAATIKA ALUSTE I KÖITES ” Hulgateooria ” ( Selle resultatiivosas ) toodud filosoofiline arendus : mittetuhjadest hulkadest ; valiku aksioomist ; ja TEISENDUSEST, koos selle määratluses sisalduva multiplikatiivse pöördteisenduse olemuse ja möttega.
( Vt. näiteks : Rez. 4. 10. lk.377. , Rez. prgr. 2. “Funktsioonid” , jm. )
N. Bourbaki “Hulgateooria”, väljastaja “Mir” , MOSKVA 1965 .
03.01. Esimene .
Esimene Einsteini postulaat on meelevaldse inertsiaalsusteemi absoluutsus ja sellest tulenev justkui heuristiline järeldus Newtoni absoluutse ruumi AR olematusest .
See lähtub arutlusest, et kui me ikkagi ei suuda avastada Maa omaliikumist “eetri” suhtes, katsetes Maal , siis sellist ruumi ei eksisteerigi. Ometigi andis Newton otsese ja range nöude : mistahes mehhaanika-nähtus ei ole muutuv taustsusteemis endas, kuitahes kiirelt see keha ka ei liiguks uhtlaselt ja sirgjooneliselt. Maa – on oma olemuselt taustkeha, milles toimuvad katsed ei saagi meile midagi anda, ei Maa liikumise suurust ega suunda, ega muid mehhaanikaseaduste muutusi. Lisaks nuud me teame, et mistahes omaliikumine kompenseeritakse nii kinemaatikas kui elektromehhaanikas . Seega on erirelatiivsusteooria sellises eitavas postulaadis eksitavalt segi aetud möisted : taustkeha ja inertsiaalsusteem – ruumi möistega, milles need taustkehad ja susteemid liiguvad, olgu selleks siis AR vöi selle alamruum R(c).
Eksitav ongi siinjuures relatiivsete ruumide ( mingi ulatuvusega taustkehi sisaldavate ruumide ) intuitiivne samastamine matemaatiliste absoluutsete ruumidega, millesse arutleja vöib end mistahes ajahetkel mistahes ruumipunktis mistahes orientatsioonis ettekujutada, nöudmatagi neis ruumides ( kui abstraktseis pidevais Cartesiuse koordinaadistikes ) mingite taustkehade olemasolu vöi vaatleja enda seotust mingi olemasoleva taustkehaga . Selline abstraktsioon paigutab nimelt vaatleja, kui möötja , sellesse abstraktsesse geomeetrilisse tuhjusse, mida ju esimene postulaat just vältida puuab . Nimelt selline “uldistus” vöimaldab “mööta” mistahes sundmusi vöi nende asukohti, kusimata nende toimumise tegelikkuse vöi vöimalikkuse kohta : (valgus-)signaalist lahutunud vaatleja saab opereerida mistahes liikumises , kasutades matemaatilist aparatuuri , samastades need omavahel .
See on jällegi vöimalus Zenonil postuleerida liikumise olematust : lastes näiteks kahel (valgus)-signaalil lähtuda arvteljel , kohtadest 0 ja 1 , teineteise poole, ja nöudes et signaalid läbiksid järjest (ruumi pidevuse nöudest ) köik ruumipunktid, saab näidata, et need signaalid ei jöua kunagi omavahel kokku – ruumi kontiinum-vöimsuse töttu .
03.01.01. Eksitavast geniaalsusest .
Sellal kui Ruumi möiste allub pea täielikult ja uldiselt abstraheerimisele, mis ei nöua seda ruumi esindava mingi uldise elemendi olemasolu, ja säilitab vaid nö. mahutavuse ja läbitavuse eksisteerivatele kehadele –
on taustkehad juba ranged hulgad oma olemasolevate elementide kindlate omavaheliste asukohtadega, millesse asetunud Vaatleja saab soovi korral määrata ka nende asukoha ruumiliselt – iseenda poolt määratud ja orienteeritud koordinaadistikus . Nimelt sellisena allub taustkeha valiku aksioomile : mittetuhja hulgana, mis sisaldab nii olemasolevaid elemente kui ka multiplikatiiv-komposiitseid teisendusi teise taustkeha ja tema ( hulga-elementide ) kohta . Ruumiteisendusest seoses mingi kiirusega v saamegi rääkida ainult kui kogu Vaatlejat umbritseva möödetava ruumi R(c) teisenemisest, milles teisenevad köik selles ruumis liikuvad taustsusteemid ja -kehad. Ja vastupidi : mingis teises taustsusteemis oleva vaatleja V* jaoks teiseneb esialgne ruum R(c) , milles meile oli antud kiirus v (!), -vaatleja V* “umbruse” teisendusena , milles muutuvad esialgsed ( nuud liikuvad )vahemaad ja möötkavad taustkehade vahel .
Sellise sönastuse möttes ongi Einsteini esimene postulaat – eksitavalt vigane !
Osundan sellise arutluse söna-sönaliselt, sest see on kujunenud 100 aasta jooksul klassikaks :
= Nuud teeme uhe väikese, ent olulise uldistuse. Eespool rääkisime inertsiaalsete taustkehadega seotud relatiivsetest ruumidest ja nendes toimuvatest mehhaanilistest protsessidest. Tegelikult ei ole reaalse materiaalse taustkeha olemasolu vajalik. Me vöime soovi korral taustkeha lihtsalt kujutleda. Seepärast räägime edaspidi inertsiaalsete taustkehade asemel lihtsalt inertsiaalsusteemidest. = P.Kard , lk. 12.
Selline arutlus vöimaldab meil vaadelda tuhjade ruumide mistahes seoseid tegelikkusena, nimetades neid seoseid seejärel paljasönaliselt “teisendusfunktsioonideks”, samas kui need ei ole ei teisendused ega funktsioonidki.
03.02. Signaali u ja kiiruse v invariantsus taustkehadel .
Erielatiivsusteooria teine pöhipostulaat väidab, et valguse kiirus ei söltu suunast uheski inertsiaalsusteemis ja on köikides inertsiaalsusteemides uhesugune.
See on töepoolest nii, niipea kui me oleme kasutanud valgust signaalina c neis taustkehades, vastavates ruumides R(c) . Sama kehtib meile antud kiiruste v kohta , taustkehadel .
Anno Domini 2008 , Tönu Eevere , Jaama 4-1, 44311 Rakvere , Eesti Vabariik .
20.01.2009
21.07.2008 TONU 1.2.
Peegeldus – ruumimöötmed risti kiirusega v .
01. Eelnevas olen röhutanud, et peegeldusteisendused – ei ole liikumisteisendused, kuid möönsin nende sobilikkust nimelt liikumiskiirusega v ristuva tasandi homoteetsuse möötmiseks ja valgussignaali kiirgava keha poolt väljastatava nn. valgussfääri kuju muutumiseks elliptiliseks, kokkusurutuks kiiruse v ristsihis.
Esitan omakeelse tölkena (juba eelnevaltki tölgitud teosest ” Fuusikaline entsuklopeediline sönaraamat “) kaks märksönalist artiklit
( NB ! Nende aluseks on toodud teiste autorite seas ka I.E.Tamm ja peegelduskatse autoriks on toodud Albert Einstein (1905) ) :
01.01. ” Valguse peegeldumine ja murdumine liikuvatel keskkonna eraldusribadel.
Kui elektromagnetlaine langeb kahe keskkonna liikuvale eraldusribale, siis, nii nagu ka paigaloleva piiri puhul, laine osaliselt peegeldub, aga osaliselt läbib selle piiri. Kuid piiri liikumine toob esile terve rea uusi fuusikalisi efekte : selgub, et langemisnurk ei vördu enam peegeldusnurgaga, aga lainesagedused köigil kolmel lainel – langeval,peegeldunud ja murdunul – on erinevad, mönedel piir- kiirustel vöib puududa peegeldunud kiir, kuid on olemas kaks erinevate sagedustega murdunud kiirt jne. .
Vaatleme lihtsaimat näidet – valguse peegeldumist tuhjuses liikuvalt peeglilt (Einstein, 1905). Sellisel juhul läbiv laine puudub ja on vaid langev ja peegeldunud lained (joon.1.). Kui peegli kiirus v on suunatud selle peegli tasapinna normaalipidi, aga laine langeb peeglilile nurga (a1) all normaali suhtes, siis peegeldusnurk (a2) avaldub (a1) kaudu järgnevalt :
cos(a2) = ( 2b + (1+bb)cos(a1)) / ( 1+ bb + 2bcos(a1) ) , …………………….. (6)
milles b = v/c ( eeldatakse, et peegel liigub langevale kiirele vastu ).
Kui b = 0 ( peegel on paigal ), saame cos(a1) = cos(a2) , st. langeva ja peegelduva nurga vördsuse.
VASTUPIDI: kui v suurus läheneb c, siis (a2) läheneb 0-le mistahes (a1) korral, st. isegi libiseval langemisel peegelduv laine lahkub peeglilt piki normaali.
Peegeldunud laine sagedus on seotud langeva kiire sagedusega vastavusega : (w2) = (w1)( 1 + 2bcos(a1) + bb ) / ( 1 – bb ) … ( 7 )
Kui laine langeb peeglile piki normaali, avaldub viimasest seosest (7) :
(w2) = (w1)(1+b) / ( 1 – b ), …………………………… ….. (8)
Kui peegli kiirus on valguskiirusele lähedane, on peegeldunud valguslaine sagedus palju kordi suurem langeva laine omast.
Uldisel juhul lahutuspiir ei ole ideaalselt peegelduv, mistöttu, peale langeva ja peegelduva laine on meil tegemist ka murdunud lainega. Peale selle, nii lahutuspiir kui ka keskkonnad mölemal pool piiri vöivad liikuda erinevail kiirustel. Kui keskkondade kiirused mölemal pool lahutuspiiri on paralleelsed lahutustasapinnaga, kaasneb peegeldumisega piirilt polarisatsioonitasandi pööre, kusjuures pöördenurk on vördeline piirnevate keskkondade suhtelise kiirusega.
Peegeldunud ja murdunud lainete leidmiseks on vajalik teada tingimusi, mida rahuldavad väljad lahutuspiiril. Taustsusteemis, milles lahutuspiir on paigal, on piiritingimused samased kui liikumatute kehade elektrodunaamikas. Lainesageduse muutumise järgi peegeldumisel vöib määrata lahutuspiiri kiiruse. On tehtud ka ettepanek kasutada seda efekti elektromagnetlainete sageduse suurendamiseks, kasutades selleks peegelduvaid kehi, eraldi näiteks kiirendatud plasmakimpe. Eksperiment kinnitas sellist vöimalust, kuid saavutatud lainesageduse muutuse efektiivsus on olnud seni väike. ”
01.02. ” Elektromagnetlainete kiirgus liikuvas keskkonnas.
……. Keskkonna liikumine viib selleni, et valguse kiirus erinevais suundades osutub olevat erinev (vt. seost (5)).
Seetöttu pind, millel kiirgusväli on erinev nullist, ei ole enam sfääriline. Arvutus näitab ,et sel pinnal on pöörleva ellipsoidi kuju summeetriateljega, mis on suunatud keskkonna liikumiskiiruse järgi. Ellipsoidi poolteljed kasvavad lineaarselt aja kulgemisega, aga ellipsoidi keskpunkt nihkub paralleelselt keskkonna kiirusega. Seega, pind, millel on keskendunud kiirgus, uheaegselt nii paisub kui ka ” veetakse vooluga kaasa ” liikuvas keskkonnas.
Kui keskkonna nihke kiirus on vördlemisi väike, siis kiirgusallikas asub sellise pinna sees ( joon.2 ). Kui aga keskkonna liikumiskiirus uletab valguse faasikiirust, siis paisuvat pinda “puhutakse” sedavörd tugevalt, et see osutub olevaks “allpool voolu” ja kiirgusallikas asub sellest sfäärist väljaspool
( joon. 3). ” ( lk. 869 – 870 )
02. Einsteini katse (01.01.) – on reaalselt läbiviidav töendus : suhtelises liikumises taustkehade relatiivsest homoteetsusest, kusjuures peegeldunud signaali aberratsiooninurk ja suurenenud lainesagedus iseloomustavad kooskölaliselt kehade suhtelise liikumise kiirust nende “lähenemisel”.
02.01. Joonisel 1. Einsteini poolt esitatud katse skeemi saab eriti ilmekalt kasutada erinevate ruumide kui taustsusteemide illustreerimiseks, kui me vaatleme möödetavana Meile (kui vaatlejale kohal O) mingil kiirusel
v meile läheneva (suhteliselt kiire) peegelduva objekti körgust maapinnast. Sellisel juhul vöime meie mingil alghetkel saata impulsslaseriga signaali objektille, millelt see peegeldub tagasi. On kerge näha, et objektist allpoololev ruum – on nö. paigalolev ruum, mis sisaldab Meid, väljasaadetud välget ja välke ning objekti kohtumispaika selles ruumis mingi ajavahemiku pärast alghetkest; samas: peegeldunud välge möödistab nuud juba nö. objekti kohal olevat ruumi, mis liigub kiirusel v koos objektiga, moondunud (aberratiivse ja suurenenud sagedusega) signaaliga (peegeldunud välkega). See ruum on risthomoteetne – ja , ja ka nimelt, selle katse kohaselt. Samase katsega saab näidata, et meist eemalduva objekti poolt peegelduv välge väheneb lainesageduselt, kuid ruumi risthomoteetsus on möödetav samaselt.
02.02. Signaali polarisatsiooninurga muutus määrab piiriga eraldatud kehade omavahelise ristkiiruse (piiritasandiga paralleelse) olemasolu ja suuruse.
Vaata: guroskoopi – peegelduva objektina ! 22.07.2008
Vaatlemegi nyyd eelneva taustal : nurkkiirusega k pöörlevat peeglit, mille normaalisihiline kiirus v(x) meie suhtes vastab peegelduspunktis hetkkiirusena v (selleks saab valida peegelpunkti kaugust pöörlemise keskmest).Sellist peegelpunkti pöörlemist saame iseloomustada lainesagedusega w .
Kehtivad Doppleri efekti kohased liikumisteisendusfunktsiooni f rakendumine ristsihis – seega peegli tasapinnas , ja pöördteisendus-
funktsiooni g järjestrakendamisega kirjeldatavad ruumiteisendused, lainesagedusele w(0) .
a) Peegeldunud signaal omandab teisenenult kuju: w = g(w(0) / L) , mis vastab Paul Kardi eelpool toodud teoses lk. 141 toodud valemile (33.3.) ja järeldusile sellest: (33.5) ja (33.6) Doppleri efektist yldkujul ja erandeina.
Seda saab vaadelda kui “elektroni kokkusurumist eetri poolt”.
b) Peegeldunud signaal liigub teisenenud nurgaga: sina`= g(sina / L) , mis
vastab Paul Kardi eelpool toodud teoses lk. 68 toodud siinuse valemile (17.17) nn. valguse aberratsiooni y-dimensiooni teisenduse.( NB! Antud katses me ei vaatlegi mingit konkreetset x-dimensiooni vöi selle teisenemist ! )
Seda saab vaadelda kui teisenenud ruumi risthomoteetsust.
c) UUS: Vaadeldes tähistaevast, näeme, et Maa omakiirus on teatud “ymbrusele” vörreldav valguse kiirusega, nii et piirnurk a(0) on Doppleri ristefekti tulemusel vaadeldav “kaugete tähtede punanihkena” – Hubble` konstandi kohaselt – vördelisena “ymbruse” kaugusega Maast.
Sellise piirnurga arvutuse esitab P.K. lk. 142 valemiga (33.9) kujul:
1 / L = f ehk f L = 1 , milles eeldab omakiiruse v vörreldavust c-ga.
Järeldus: Maa summarne omaliikumine – on vörreldav valguse kiirusega c, pöörlemise, tiirlemisega ymber Päikese, kaasapöörlemisega Galaktikas, galaktikaparvedes jne. . Maa omaliikumine avaldub tähtede aberratsioonis ja punanihkes, vördelistes vaadeldava sfääri kaugusega Maast.
02.03. UUS !
A.Einsteini poolt esitatud (eelnevas) nn. peegelduskatset on puutud rakendada fuusikute poolt relativistlike osakeste energia-taseme töstmiseks, mis on katseliselt ka kinnitust leidnud. See ei ole aga osutunud otstarbekaks katse kulukuse ja efekti väiksuse töttu.
Näiliselt vöiks praegu, kui on katseiks avatud Euroopas suurim CERN-i kiirendi,seda katset korrata (ja oletatavalt seda ka tehakse!): seejuures tuleks kasutada nimelt lasertehnoloogia abil – vöimalust suunata hiidvälkeid ringtoru seinast – vastu ulikiirendatud osakestevoole, kui peegelpinnale, mis suunab muundunud footonite välgete-voo “otse tagasi”.
Samas sunnib mind (tonu) sugavalt kahtlema sellise katse otstarbekus, sest :
oletan selles peegelduskatses tarviliku peegelpinna piirkiiruse v olevat
(et peegeldus ikka oleks piki pinna normaali) – parajalt tarviliku ja piisava, et rakenduks relativistlik efekt – “v lähenemisel valguse kiirusele c – Doppleri pikiefekt nö. kompenseeritakse – ja möjule pääseb Doppleri ristefekt, kui “isegi lähenemisel täheldatav “punanihe” uletab lähenemise möju”, nii kui teist järku efekt uletab piirjuhtudel esimest järku tulemi.”
Kui tähistame “piirnurga” a, siis saame Paul Kardi esitatud piirjuhule (lk.142. , valem (33.9)) seose : f = “epsilon”, pärast mida koguefekt saab ja jääb – negatiivseks. (Siin : f – on liikumis-teisendusfunktsioon f(ct) ja “epsilon” – on risthomoteetsustegur, pöördvördeline Lorentz-faktorile.)
Loomulikult ei eita ma sellise oletuse kontrollkatse vajadust, niipea kui kiirendites saadavad kiirused lähenevad tarvilisele vöi peaksid seda uletama.
20.01.2009
TONU 1.1. 20.01.2009
Liikumisteisendustest aegruumis
01. TEISENDUSED on oma olemuselt vastavused , millega me vaatleme mingit mittetuhja hulka X teisenenuna mingis kokkuleppelises reeglistikus f hulgaks f (X) . Sellisel teisenemisel on matemaatiline kirjeldus :
vastavuse f ja selle pöördvastavuse g kujul , nii et g ( f ( X ) ) = X . Kui f (E) = F , st kui mistahes y jaoks hulgast F eksisteerib hulga E element x , selline, et y = f (x) , öeldakse, et f on hulga E surrektiivne vastavus hulgaks F ; et f on hulga E teisendus hulka F.
Kui hulga E vastavus hulka F on selline, et iga y jaoks eksisteerib ja on ainuke E element x , millejaoks ” f (x) = y ” ( teisitiöeldes: g ( /y/) = x avaldab uhtainsat elementi hulgast E ), nimetatakse f hulga E uksuheseks vastavuseks hulgaks F , ehk biektiivseks vastavuseks.
Kui f – on hulga E uksuhene vastavus hulgaks F , on vastavus
” y = f (x) ” funktsionaalne mitte uksi y , vaid ka x järgi .
Niikui funktsionaalne vastavus f x järgi, määrab g uksuhese vastavuse hulga F – hulgaks E , mida nimetatakse pöördvastavuseks ” g (y) = x ” ;
Selliselt määratletud hulkade vastavust matemaatiliselt ettekujutatavas aksiomatiseeritud nn. absoluutses ruumis AR , mille alamruumid on nii R (E) kui ka R (F) , nimetame RUUMITEISENDUSTEKS .
Teisenduse toime taastab PÖÖRDTEISENDUSE , nii et f ( g (y) ) = f(x) , teisenduste komposiidi (järjestrakendamise ) möttes, selle multiplikatiivses kujus , viies vaatleja nö. tagasi esialgsesse taustkeha ruumi . On saanud tavaks eristada teisendusfunktsioonide additiivset ja multiplikatiivset kuju : nende pöördvastavuste konkreetsel nimetamisel VASTANDFUNKTSIOONIKS ( teisendustehte – liitmise puhul ) ; ja vastavalt PÖÖRDFUNKTSIOONIKS ( teisenduse multiplikatiivsel kujul ) .
NB ! (Eelnevad möisted on tihti eksitavalt segiaetavad, mis on seletatav könekeelele omase mitmetähenduslikkusega .)
Eriti ilmekalt tuleb selline, loogiliselt vastuoluline, arutlus esile nimelt erirelatiivsusteooria populistlikes “selgitustes”, millega tegi algust juba
A. Einstein ise, kui arvutas nn. “einsteini rongi pikkust edasi-tagasi valgussignaaliga” .
Järgnevas olen sunnitud ikka ja jälle sellisele eksitusele tähelepanu pöörama :
mingil kiirusel v liikuva taustkeha F ruum teiseneb mingis vastavuses f ( E) , mis on söltuv ainult kiirusest v , mis on määratud F poolt läbitava teepikkusega mingis ajauhikus signaaliga u möödistatud taustkehal E , seda vöib tähistada kui TEISENDUSFUNKTSIOONI f ( v ) ; SEDA TULEB VAADELDA KUI TAUSTKEHA F MÖÖDETE MUUTUMIST vastavalt meile antud kiirusele v TAUSTKEHAL E ,
mis on möödetud signaaliga u . Seda tuleb vaadelda : kui ruumimöötmetele ut RAKENDATUD teisendusfunktsiooni f ( ut ) .
Käesolevas röhutab autor : ei ole keelatud vaadelda-mööta peegeldusteisendusi kujul f (-v) f(v)( ut ) = 1( ut ) , kuid see ei ole liikumisteisendus!
Fuusikaliselt saab sellisele vaatlusele anda interpretatsiooni kui PÖRKELE , milles Vaatleja taustsusteemis kohtuvad kaks vördsete massidega keha
( piljardikuuli ) vördsetel vastassuunalistel kiirustel (v) ja (-v) , ning mis , vahetanud omavahel kiiruste v suunad, jätavad paigale vaatleja V enda .
Sellisest arutlusest ongi pärit erirelatiivsusteooria pikkuste kontraktsioon teguriga : Lorentz-faktor gamma .
Ja selleks et säiluks arvutuslik (kogu)eukleidilisus, möeldi välja ka aja dilatatsioon ja pseudoeukleidiline ruum .
01.01. TEISENDUSFUNKTSIOONIDE ABELI RUHMAST .
Ruumiteisendused on funktsionaalsed alamruumide vastavused f , mis kirjeldavad signaaliga ( kiirusel u, c , … ) vaadeldavas ruumi ulatuvuses R (u) olemasolevaid kehasid , mis on omavahel liikumatud , taustsusteemina E , ning erinevaid taustkehi , omavahel liikuvaina , mingil signaali kiirusega vörreldavatel kiirustel v .
Liikumisteisendused on ruumiteisendused, mis on seotud mingite konkreetsete sundmustega ruumis, erinevates taustkehades : sundmusena vaadeldakse mingit protsessi mingis vaadeldavas taustsusteemis, mis toimub mingil ajahetkel t mingil kaugusel ut vaatlejast V , ning mis vöib koosneda erinevaist protsessi osadest nii ajaliselt kui ruumiliselt eraldatud jadadena. Sellise jada vöib moodustada : ” signaaliga taustsusteemi möötmine – signaali saatmisega mingil alghetkel t = 0 mingist möötmise algpunktist vaatlejal , selle signaali kättesaamine mingil teisel kehal selles susteemis, jne. ” ; vöi siis
” eelneva protsessi vaatlemine ajalis-ruumiliselt – teises taustsusteemis, mis liigub esialgse suhtes, mingis vaatleja orientatsioonis, suunas ja kiirusel v ” .
Asukohad ja kiirused paigutuvad vaatleja omaajas, alamruumis R(u) , MEILE ARVUTATAVALT : teisendusfunktsiooniga f ja tema pöördfunktsiooniga g , aegruumilistes möödetes f (ut) ja g (ut) .
Operatsioonisusteem selliste liikumisteisendus-funktsioonidega peab pöhimötteliselt mahtuma – Poincare` teisenduste ruhma , säilitades looduses täheldatavad neli invariantsusseadust :
1) nihe/luke : asukoha meelevaldsus loodusseaduste toimimisel – ruumi homogeensus ;
2) pööre : ruumi uksköiksus suundade suhtes – ruumi isotroopsus ;
3) ajanihe : ajahetke uksköiksus protsessi kulgemisele – aja homogeensus ;
4) liikumisteisendused : kiiruste muutumatus teisenevas ruumis – aja absoluutsus ;
Tösi, Poincare` kasutab Lorentz-teisendusi ja additiivset operatsioonisusteemi, mistöttu tema ruhmas on invariantne mitte aeg, vaid sundmustevaheline aegruum. TONU ei näe pöhjendusi muuta aega.
( NB ! Invariantsus-summeetriad 1 – 4 kehtivad täpselt ainult välistest möjudest isoleeritud susteemis , s.t. juhul, kui vöime mitte arvestada väliseid faktoreid ; reaalsetes susteemides on need öiged vaid ligikaudselt . )
Matemaatiliselt uheselt määratud funktsioon f ja tema pöördfunktsioon g omavad aegruumis R(u) konkreetset fuusikalist mötet :
f – määrab mingi taustkeha liikumise vaatleja taustsusteemis ;
g – möödab signaali liikumist teises susteemis, oma aegruumist vaadelduna ;
gf – pöördub tagasi algsusteemi aegruumi .
Antud juhul on asjakohane tuntud apooriline möistatus kolmest akadeemikust, kes öunapuuaias hobuselöunat pidades sugavalt uinusid , vihastades välja puu otsas kugeleva öunavarga, kes juba ammugi ära liduda tahtis . Karistuseks sellistele unistele loodritele vöttis see virk öunaraksija maast muda – ja määris sellega köigil kolmel targal otsaesised kokku . Ärganult pahvatasid targad homeeriliselt naerma , kuid äkki jäi uks neist murelikuna vait , seejärel teisedki. Miks ? ja kuidas sai esimene aru, et ta on naeruväärne ? . Asjakohane ongi siin arutlus :”nähtava” ja “pöördvaatluse” analoogias – vaatleja enda seisukohast .
01.02. Antud juhul on aegruumi vaadeldud invariantsusseadustele alluvaina, milles p.1. avaldub punktis 4. kujul :
r = ut ; nihe : r + vt` = r` ; teisendusena r` = r – vt ;
teisendusfunktsioonina f : r` = f (r) = f (ut) = ut ( 1 – v/u ) .
Näeme : nihe/luke – ei ole teisendus, vaid liikumise kirjeldus, mille vastuolulisust näitas juba Zenon, ja nimelt sellise apooria lukkaski umber Galilei teisendus . Meie vaatenurk ei luba vaadelda teisendusfunktsiooni enda sisus-kujus olemasolevaid tehteid
( liitmine, sisalduvus, järjestus, vöi mistahes lausearvutuse söna vöi term vms. ) teisendusfunktsioonide endi operatsioonisusteemina .
Ruhm on ise uheoperatsiooniline hulk, milles meie näeme multiplikatiivset järjestrakendamist, koos teisendus- ja pöördteisendus- funktsioonide määramis- ja muutumispiirkondade igakordse range eristamisega vastavais taustkehades. Tinglikult saabki seetöttu nimetada sellist ruhma : kommutatiivseks e. Poincare` Abeli ruhmaks.
Aegruumi isotroopsus avaldub ” uksköiksuses kiiruse v meile etteantud suuna ja suuruse suhtes “, mitte aga selle suunaga ristuvais ruumimöötmetes ( erirelatiivsusteoorias : kiiruse-sihilistes möötmeis ) .
02. Hulgateoreetiliselt mistahes ruumivaatlusel ( piisava mahutavusega ruumi , milles eksisteerivad erinevais liikumisis hulgad oma elementidega ), on tarvilik eeldada valiku aksioomi ( ka: Zermelo aksioomi ) kehtivust.
VALIKU AKSIOOM:
Olgu R / x, y / – vastavus uldise elemendi vahel x hulgast E ja uldise elemendi vahel y hulgast F.
Kehtib ekvivalentsus kahe alljärgneva Lause vahel :
” milline ka ei oleks x , eksisteerib selline y , et R / x, y / ”
ja
” eksisteerib selline hulga E teisendus f hulka F , et köigi x jaoks R / x ; f(x) / “.
Märkus: Valiku aksioomi nimetus on tulnud ebaönnestunult venekeelsest sönast “vöbor”, mis justnagu vöimaldaks meil(vaatlejaina) näidata vöi koguni väljavalida (?) mistahes elementi mingist hulgast. See ei ole nii. Täpsem oleks siis kas
” eksistentsi- vöi olemasoluaksioom “, mis välistaks opereerimise vöimaluse nö tuhjade hulkade ja olematute operatsioonidega.
Kahjuks aga nimelt valiku aksioomi eirab erirelatiivsusteooria, eitades mistahes reaalse taustkeha olemasolu vajadust nn relatiivsetes taustsusteemides: ja kahjuks opereerivad “Lorentz-teisendused” nimelt ruumi-vastavusega, mis ei ole teisendus hulgateoreetilises möttes ega seda vähem ruumi-vastavus, millel oleks korrektne pöördfunktsioon.
( On kerge näha, et erirelatiivsusteooria vastavused on leitud kahe erineva relatiivse ruumi-vahelise valgussignaali edasi-tagasi möttelise peegeldusteisendusega. A propos: millegipärast kinnitab siiani gumnaasiumi-matemaatika, et ka peegeldusteisendus – olevat liikumisteisendus (?). – Samamoodi on ju tautoloogiline arutlus, millekohaselt vaadeldakse liikumist teisendusega f(v), rakendatakse seejärel f(-v), ning eeldatakse kehtivat f(v) f(-v) = 1 (?) .
See ei ole midagi muud kui arutlus : SIGNAALI ABSOLUUTSUSEST, MITTE AGA SIGNAALI KIIRUSE JÄÄVUSEST – IGAS INERTSIAALSUSTEEMIS ERALDI ! )
Tuleb vaid ölgu kehitada ule saja aasta-taguse (aastast 1905) ruumivastavuse “sobitamise” ule aegruumidele, mida siiani “heuristilise jöuga” on kasutatud selle kriitikakatseis.
03. Galilei-Newtoni relatiivsusprintsiipi vöib sönastada: mis tahes taustkeha uhtlane ja sirgjooneline liikumine ei avalda mingit möju selles taustkehas kulgevatele mehhaanikaprotsessidele. Siinjuures esitab erirelatiivsusteooria kusitavuse : mille suhtes see taustkeha siiski liigub vöi on paigal ? – see on tautoloogiline kusimuse pustitus, mis on analoogne kuulsate Zenoni apooriatega, ja millekohaselt liikumist ei saagi olla.
Selle mötestas lahti Newton, eeldades (möttelise) absoluutse ruumi AR olemasolu, milles me arutleme liikuvaina olemasolevaid taustkehi ja erinevais liikumisis vaatlejaid. AR oli kui ruum, millesse paigutus Cartesiuse ristkoordinaadistik : vabalt valitud vaatlejaga koordinaatide algpunktis JA KOGU GEOMEETRIA AKSIOMAATIKAGA .
Absoluutse ruumi olemasolu otstarbetus ei ole samas sugugi nii silmnähtav. Vastupidi: tuleb vaid vaadelda kosmoloogilist Absoluutset Ruumi, milles materiaalsed kehad ja susteemid ei saagi pusida nö paigal, stabiilsetena, kuivörd on sunnitud liikuma AR suhtes oma nn loomulikus liikumises, seejuures pöörlevas-tiirlevas, kuna AR ise on ju suundadest söltumatu, isotroopne. Liikumise algimpulsi ja selle liikumise stabiilsuse saab tagada valguse homogeenne röhk – löpmatus ruumis, löpmatu aja kestel, löpmatult hulgalt valgusallikailt. (On möistetav, et mistahes AR-s paigalolev piisavalt suur (valguse röhu suhtes) materiaalne keha kas hakkab liikuma mingis suunas, vöi peab energia liiasuses plahvatama, viies siis juba oma osised nö loomulikku liikumisse.) Ja eks könekeeles vöibki ju väita, et Absoluutne Ruum on ainus ruum Looduses, milles puudub pusiv paigalolev mateeria. Ja kui me möödame valguse levimise kiiruseks mingis taustkehas (Maal) suuruseks c , siis on see kiirus samane ka teistes taustsusteemides, mis liiguvad meie suhtes uhtlaselt sirgjooneliselt, – ja vastupidi. Absoluutse ruumi olematuse-usk – on kui kuri usk Jumala olematusesse, jäädes ise usutasandile ateismi nime all.
Järgnevalt näeme, et mistahes mingile reaalsele Objektile ( rong, paat, vm ) omistatud kindel kiirus v paigalolevas taustkehas jääb konstantseks Objekti enda uleminekul mönda liikuvasse susteemi, kui see keha ” soovib säilitada oma objektsust ” , st jääda paadiks ( vöi paadialuseks ?).
Selle remarki kohta on tavaks öelda, et kindel kiirus ( nii u kui v ! ) on matemaatiline objekt, mis on meile antud ja millega me ei oska ega tahagi midagi peale hakata ( iseasi on , kuidas see kiirus näib teisest susteemist vaadelduna ) . Sellise kiiruse kandjat u , millega me oleme möödistanud Ruumi (!) ( vöi mötteliselt suutelised möötma köigi omavahel liikumatult eksisteerivate elementide asukohti selles ruumis ), (vrdl. footoniga) nimetame signaaliks , könekeeli saab selle möiste endale signaali kiirus (vrdl. valguse kiirus c ) . Selliselt vaadeldavat Ruumi vöime nimetada inertsiaalsusteemiks nii erirelatiivsusteoorias kui ka Newtoni möttes – taustkehaks.
Käesolevas ei erista autor logistiliselt : taustkeha kui mingit punktmassi esindavat objekti – Newtoni möttes nö. ulatuvusega taustkehast, milles ( vöi millel ) me endid kujutleme vaatlejaina – vaid toob arutlusse sisse : meid huvitava ulatuvusega alamruumid, millesse mahuvad kehad ja nende susteemid .
04. Olgu meil Ruumis R(u) taustkeha ( näiteks Maa ), milles Vaatleja arutleb. Valigu Vaatleja V mingi signaali u , millega ta möödistab paigalolevaid eksisteerivaid objekte asukohtadega r(u) , enda suhtes, asudes ise Cartesiuse ristkoordinaadistiku algpunktis O .
Vaatleja eeldab Ruumi eukleidilisust, suundade samaväärsust ja nende eelduste säilimist uhtlases sirgjoonelises liikumises. Sellises ruumis R(ut) on vöimalik mööta mingi reaalse keha liikumise kiirust kui vt , mis on seotud ruumimöödetega ut , nii et Vaatleja vöib end kujutleda liikuvale taustkehale vaatlejana V* ( praktiliselt saab seda vaadelda näiteks “rongis söitmisena”, milles eespool olev jaam läheneb rongile nimelt seosega ut – vt .)
Nimelt selliseks “relatiivseks vaatluseks” – loodi liikumisteisendused .
Meie arutluses kuulub ruum R(ut) alamruumina Newtoni Absoluutsesse Ruumi AR ,milles aeg on absoluutne.
Sellistesse alamruumidesse “mahuvad” köik omavahel taustkehadena seotud vaatlejad V* mistahes kiirustel v.
On selge, et möttetu on rääkida nö.” liikumisest sellise ruumi suhtes “, kuivörd “selles ruumis asuvate erinevate taustkehade ( erinevate kiiruste v ) vördlevast kirjeldusest, millest uks taustkeha V on reaalselt määratud koos tema suhtes paigalolevate eksisteerivate elementidega ( kehadega ) “. Samas omandab mötte R(ut) eristamine nö. absoluutsest ruumist AR -tema möödetava ulatuvuse poolest ( signaaliga u ) .
Galilei-Newtoni teisendus annab meile seosed V ja V* vahel: x = ( ut – vt) = ut(1-v/u) ehk f(ut) = ut(1-v/u).
Vaatleme raudteed ja vahemaid sellel aegruumilisena, möödetuna signaaliga K* kiirusega u.
Asugu mingil alghetkel jaamas A liikuv kaubarong A* kiirusel v ;
jaamast B ( kaugusel AB = ut ) väljugu samal alghetkel teine kaubarong B* samal kiirusel v , nii et nendevaheline kaugus ei muutu.
Saadame jaamast A kiirrongi K* sel hetkel kaubarongile B* järele ning vaatleme neid liikumisi Vaatlejaina nii A-s kui ka A*-s.
Leiame, et kaubarongi A * liikumine B jaoks on määratud :
x = ut; x` = ut (1 – v/u).
Leiame, et kiirrong K* saab kaubarongi B* kätte raudteel kohal :
x = ut; x* = ut/(1 – v/u).
On lihtne näha, et kui tähistame : x` = f (ut) ja x* = g(ut) ,
siis f (ut) = ut (1 – v/u) on funktsionaalne seos, olles teisendusfunktsiooniks, mille pöördfunktsiooniks on :
g (ut) = ut/(1-v/u), nii et g(f(ut)) = ut.
05. Näitena ! Vaatleme jöel liikuvaid 2 parve A* ja B* , jöevoolu kiirus olgu v . Jöekaldal asugu maantee. Mingil alghetkel t = 0 asugu parv A* kohal A ( kui sadamakai körval, millel asub kullerteenistus ), parv B* aga asugu teise kai ääres kohal B , nii et AB = A*B* = x = ut .
Olgu kullerteenistusel 2 amfiibautot K*(1) ja K*(2) , millede kiirused nii vees kui maanteel oleksid vördsed, suurusega u , nii et u = 2v .
Sellega vöime lugeda amfiibautod K* signaaliks u vastavalt endi taustkehades ( vees ja maal ).
// Eksitavaks tuleb liikumisteisenduse vaatlemisel lugeda kusimuse pustitamist : ” liikuva susteemi signaali u kiirusest jöel meie ( kui Vaatleja – maanteel ) suhtes ” ! See on intuitiivselt kull möistetav – ja koguni möödetav suurus – kuid ei kuulu teisenduse , kui liikumisteisenduse , möiste alla.
Kuulub aga: KIIRUSTE u ja v LIITUMISE ARVUTUSSE – JÖEL, _möödetuna Maal !_ (Samasihiliste kiirustena: u`=(u-v)/(1-v/u) , mis näitab jällegi mölema kiiruse, nii u kui ka v invariantsust – nii jöel kui maal.)
Vöi nagu on tavaks öelda: ei ole valesid vastuseid, kuivörd on vääralt pustitatud kusimusi. (Vt. järgnevas punktis ! ) ( Selline kusimus on tavaline koolimatemaatikast tuntuna kui nihke vöi lukke intuitiivne vastuolu : me nihutame joonisel kull mingi graafilise kujundi “edasi” , nii et see asub endisest kohast x kaugusel
( x + kt ) ,kuid teisendusena avaldub see ikkagi kujul x` = ( x – kt ) . ) //
Saadetagu 2 kullerit K* kailt A – TEATEGA eesliikuvale praamile, uks jöge mööda, teine piki maanteed.
Antud juhul avalduvad teisendused kujul :
f (ut) = ut(1-v/u) = ut /2; g (ut) = 2ut; f ( g (ut) ) = ut.
Oleme rangelt järginud signaali jäävust ( kiirust) mölemas susteemis eraldi.
Siinjuures f kirjeldab jöe inertsiaalsusteemi liikumist maa suhtes
( seega: parvede liikumist, möödetuna signaaliga u ) ;
g näitab TEATE kättesaamise kohta maal ;
fg aga näitab signaali u liikumist parvelt A* kuni parveni B* , kui Vaatleja asub liikumatult kailt A umber liikuvale parvele A* ,
nii et f g = 1 . Seega g näitab TEATE (signaali) kättesaamist VAATLEJA TAUSTSUSTEEMIS, funktsionaalse teisendusena eraldi taustsusteemides ( kujult sarnases nii jöel kui maanteel ) , kusjuures uleminek uhelt susteemilt teisele toimubki TEISENDUSE JA PÖÖRDTEISENDUSE DEFINITSIOONI KOHASELT (vt. p. 01.).
On ju selge, et vaatleja “taastagasitulek” esialgsesse taustsusteemi AB , möötmaks jöe kiirust maal, toimub nuud juba funktsionaalselt f ( g ( f (ut) ) ) .
06. “Terve möistuse” seisukohalt vöime alati kusida :
kumma kulleri saatmine oleks otstarbekam ?
Lihtne arvutus näitab, et parv B* saab jöeautolt signaali kätte vaatleja A jaoks kohal ut* =( ut + vt* ) ,
maanteel aga läbib kuller vahemaa ut / ( 1 – v/u ) , nii et K*(1) ja K*(2) läbivad mölemad vahemaa 2 ut .
Sellise kusimuse arutlus ” ei mahu ” aga nn. teisenduste Poincare` ruhma , sest vöimaldab spekulatsioone nö. pseudo-teisendustega, mis muudavad nii aega , ruumi kui ka meile antud kindlat kiirust v , koos selle suuna ja suurusega. On lihtne näha, et kui vaatleja ” näeb ” liikuvat taustkeha liikuvat kiirusel (-v) , siis sellise kehaga kaasaliikuva vaatleja V(-) jaoks on tagasiminek esialgsesse taustsusteemi kirjeldatav pöördfunktsiooniga g(-) , nii et kehtivad teisendused
x` = x + vt ;
kui x = ut , siis x` = ut( 1 + v/u ) = f(-) (ut) ;
ja vastavalt g(-) (ut) = ut / ( 1 + v/u ) ; f(-) ( g(-) (ut) ) = ut .
MÄRKUS : Erirelatiivsuses on tavaks tuletada Lorentz-teisendused nimelt peegelduteisendusena kujul f (v) f (-v) = 1 , nimetades neid funktsioone teineteise pöördfunktsioonideks ?! Selline arutlus on eksitav, sest ilmselgelt ei vii nende funktsioonide järjestrakendamine meid esialgsesse taustsusteemi . Need on vastandfunktsioonid additiivses ruhmas.
NB ! Arutle : kui x = ut ;
siis ( ut )* = ut + ( vt )* = ut / ( 1 – v/u ) .
Vt. näiteks teost PAUL KARD “Relatiivsusreooria peajooned”, Tln.: Valgus, 1980. , lk 41 – 47 .
// Kull tahaks teada, mida vastavad meie koolide mata-öpetajad öpilase vöimalikule naiivsele kusimusele : kas nihe “paremale” kujul ( x + vt )
on ikka teisenduse ( x – vt ) pöördteisendus ? Samas röhutan:
hulgateoreetiliselt teisendus peab olema funktsionaalne !Ja kiidaksin öpsi, kes möönaks seda töeseks – teisendustehete additiivsel kujul ( ! ), mitte mingil juhul aga multiplikatiivsel järjest- rakendamisel . //.
20.01.2009
http://www.akad.ee 18.07.2008 TONU 0.
Postiaadress : Postimaja, postkast 80, 50002 Tartu, Eesti
Saatja : Tönu Eevere, Jaama 4-1, 44311 Rakvere, tel. 54 54 88 54
TEEMA : ” Mis on loodusseadused ?” – Liikumisseaduste taustal.
Alused: Juurdelisatavad ” Ruumiteisendused” ( failid kujul TONU 0.0. … );
” LOODUSSEADUSED JA ÖKOLOOGIASEADUSED ”
Mark Colyvan , Lev R. Ginzburg “Akadeemia” 2008 nr. 7
I. Teadusvaatlejaist ja elegantsist.
01. Äaretult erudeeritud ( ja tshehhovlikult lakooniline !) artikkel
” Loodusseadused ja ökoloogiaseadused ” – oli uldmuljelt kosutav, kuni … leidsin antud kontekstis asjakohatu ideoloogilise fraseoloogia ( lk.1500, lg.2 ) :
“Nuud, mil meil on olemas selgem pilt loodusseadustest uldaiselt, pöördugem kusimuse juurde, kas bioloogias ja ökoloogias on seadusi. Me keskendume ökoloogiale, sest olukord ökoloogiaseadustega arvatakse uldiselt viletsam olevat, kuivörd ökoloogias puudub selline suur uldtunnustatud seletav teooria nagu Darwini evolutsiooniöpetus. ” ( ?! )
Kas artikli/ettekande autorid on ikka tösimeelses uskumuses, et darvinism on heuristilisena sulandunud mingisse bioloogiaseadusesse ? Millisesse siis ?
Darvinism on “arenenud” läbi neodarvinismi kaasaegsesse, möödunud sajandit häbiplekina saatnud ja siiani vöimust vötvasse, eugeenikaliikumisse. Inimese sunniline arendamine ja “kölbmatute” genotsiid – see on, mis mitte uksi teadlaste, vaid ka poliitikute jaoks peaks olema terve möistuse olemasolu ohukriteeriumiks !
Nimelt see sundis TONU tähelepanelikuks.
02. Autorid esitavad naivistliku kirjelduse nn. “popperlaste” induktiivsest arutlusest : loodusseadustele piisavuse kriteeriumina – nende kummutatavuse nöude esitamine. Samas on toodud töepoolest “lihtne falsifikatsionalistlik pöhimöte”, mis parodeerib induktiivset töestust. Vajalik oleks: ” kui olukorras O kehtib mingi E , vastavuses S , siis S esitab seadust, kui uleminekul olukorrast O järgnevale olukorrale O` me vöime ennustada tulemuseks E` ” . Siinjuures “unustavadki ” autorid, et induktiivsus nöuab vähemalt uhe konkreetse olemasoleva olukorra jaoks mingi seose ilmnemist, mis seeläbi vöimaldaks ulepea mingit ennustust ! Ainuuksi eitav tödemus, et
S(O) ei ole E, ei utle midagi ei seose enda ega väljakujuneva olukorra kohta..
03. Osundan artiklit: ” Tänapäeva teadusvaatlejad on väärilist tähelepanu pööranud ka teistele teooria väärtustele, nagu lihtsus ja elegants (Quine 1976; Fagerström 1987).” (Minu röhutus, T.E.)
Siinkohal toon kolme väljapaistva isiksuse “elegantse löpu kirjeldused” :
03.01. Vl. Nabokovi (“Kutse tapalavale”) Cincinnatuse ebamaine öövastav hirm butafoorilises hukkamises.
03.02. Evarist Galua` meeletu vaprus Bastilles`is, ööl enne hukkamist, et edastada meile oma teadmisi.
03.03. Albert Einsteini “viimsed sönad” : ” Elu kunstlik pikendamine on maitselage. Ma olen oma osa andnud, nuud on aeg minna. Ma tahan seda elegantselt teha. ” (?!) ( Werner Fuld “Viimsete sönade leksikon” )
II. Matemaatikuist ja elegantsist.
01. Matemaatik kui psuhhopaadist sarimörvar.
ALUS : “Märkamatud mörvad” Guillermo Martinez, PEGASUS, 2008 ., (avaldamisel kusida luba: http://www.pegasus.ee ), lk. 97. jne. Osundan tukati:
= M-i perekond pidas kiiret arengut geniaalsuseks, mistöttu ta kisti kogu lapsepölveks eemale omavanuste laste mängudest ja rituaalidest. …
Pilked suvendasid M-i eraldatust ning panid ta mölgutama kättemaksumötteid. Neis fantaasiates kujutleb M, kuidas tema talent pääseb maksvusele ja ta lömastab alandajad oma eduga, mis on taolistes olukordades tuupiline mötlemine. …
Kuid nuud juhtub midagi ootamatut: eksamineerijad teevad mingi ebaöiglase vea ja M-il tuleb murtuna koju tagasi pöörduda. See lööb tema hinge esimese möra, mida nimetatakse Ambere`i sundroomiks, kirjaniku järgi, kelle juures seda laadi kinnismötet esimest korda uuriti. …
Teiseks tuupiliseks nähtuseks ongi nimetatud peiteaeg,kinnistumise periood, mis vöib kesta aastaid. …
Peiteaeg löpeb siis, kui saabub niinimetatud teine vöimalus,nagu seda psuhhiaatrilises kirjanduses nimetatakse, asjaolude kokkulangevus, mille tagajärjel too hetk luuakse osaliselt uuesti vöi vähemasti näiliselt piisavalt sarnasena. … Meie mees ärkab elule. Ta otsib uhtaegu kättemaksu ja imetlust seltskonna poolt, kuhu ta on alati tahtnud kuuluda ning kust ta ebaöiglaselt körvale jäeti. … M tunneb end oma suurushullustuses loojana, ta tahab asju umber nimetada. Ta ise täiustub ja täiustub ka tema loodu: sumbolid märgivad arenguetappe nagu “Kogujas”. =
02. Uusdarwinismi ja käesoleva autori elegantne seotus tsiteerituga.
Looduslugude kaunis mustitsism ja eshatoloogiline ootus inimkonna paranemisse – see on, mis ikka ja jälle toob mötlejaid välja peiteseisundist ning viitab mingitele kataklusmidele, mis inimese periooditi puu otsast alla raputab. Kusimus: kas bioloogias on seadusi ? – on uks neist ärkamiseaegseist mölgutusist, mille loogiline ahel viib eestlase tekkimiseni, kes puu otsast kukku- nult esimest korda “kurat!” käratab.
See-eest näiteks elegantse surma- vöi tapaihaluse laialdane levik nn. isemötlejate seas – näitab ikka ja jälle Inimese nostalgilist igatsust Eedeni aia järele. Käesoleva ullitise autor ei saa end kuidagi geniaalseks pidada, kuid eks juba ainuuksi selle kirjatöö alustaminegi ju näitab midagi. Juhul, kui peaks öigus olema akadeemik Karl Rebasel, justnagu minu sooviks on olnud tahtevabaduse käsitlemine, siis peaksin kull tödema enda nakatatust dialektilisse materialismi, mis prof. Ed. Tennmanni arusaamal puuab kokku sobitada uhildamatut – Issanda kiitust, Saatana röömuks.
On tösi, et mönikummend aastat tagasi oli ideoloogiliselt voimatu arutleda Einsteini “tuhjade inertsiaalsusteemide” möttetuse teemal, muidu, kui vaid materialistlikelt seisukohtadelt lähtudes. Ja on ka tösi, et selline demagoogia vöis möne dialektilise teadlase viiagi niiöelda isiksuse kahestumiseni, kuid
aeg oli lihtsalt selline.
Kaasajal vöime vabalt kinnitada (koguni kooli algklassides !), et hulgateoreetiline postulaat – valiku aksioom – nöuab kull hulga elementide (objektide ja loogiliste operatsioonisusteemide) olemasolu, kuid seejuures ei eelda nende elementide materiaalsust (me lihtsalt ei arutle sel teemal).
03. Esitatava teleoloogiline vaatlus.
Tähelepanelikum lugeja vöib näha, et käesolev arutleja ei ole ambitsioonikas ega puuagi pakkuda midagi endapoolselt uut, tösiteaduslikku, kuivörd viitab juba ule saja aasta vanusele diskussioonile erirelatiivsusteooria alustest, lähtudes hulgateoreetilistest kaalutlustest, mis vöimaldaksid uhtse maailmavaate kujundamist, nii mikro- kui makrokosmoses, – Vaatlejana/looduna -olemasolevas.
03.01. Kuni sada aastat tagasi lähtuti liikumise kirjeldamisel Galilei-Newtoni teisendustest, mis oma lihtsuses olid funktsionaalsed juba oma additiivsel kujul, möödistatud Cartesiuse ristkoordinaadistikuga, Absoluutses ruumis. Relatiivsusprintsiip vöimaldas mingi kahe keha omavahelist kiirust mööta Vaatlejana kummas-tahes neist kahest kehast – mööndusega olemasoleva ruumi kokkulepitud orientatsioonile (Vrdl. möötmisi fuusikalaboratooriumis !). Liikuvate kehade olemasolu nöue oli ilmselge.
Reaalselt olemasolevas ruumis (möötja taustkehal) eeldati, et mingi meile etteantud kiirus v on seotud liikuva kehaga selliselt, et möötja ruumis liikudes (ilmselt niisiis mingite reeglite kohaselt) sai seda keha “jälgida”: keha oleks justkui jätnud oma teekonnast “joone”, trajektoorina, ja möötjal oleks vöimalik mistahes ajahetkel näidata/arvutada selle keha poolt jäetud “jälg” (Vrdl. pliiatsi liikumisega paberil vöi kriidijäljega tahvlil !). Selliselt konstrueeritud mudelis vöisimegi opereerida nn. vektoritega : kindla kiiruse ja suunaga suurustega. Kui selline nö. vabavektor oli seotud mingi olemasoleva kehaga, mis liikus uhtlaselt sirgjooneliselt, sai selle keha kiirust avaldada nö. seotud vektori v abil. Seotus ise oli arvutatav ja näidatav – iga ajahetke kohta, meie valitud koordinaadistikus mistahes ajahetkel, – pärast meile sobivat nn. alghetke.
Sellises, eelnevalt esitatud, mudelis – oli iga vaadeldav uhtlane kiirus v : matemaatiliselt meile etteantud suurus, millega me ei oska, ei taha ega tohigi midagi peale hakata.
03.02. Vaikimisi eeldati, et Cartesiuse koordinaadistik on möödistatud – see tähendab, et see ruum oli meil mingil kindlal kiirusel c juba läbitud, vöi me oleksime seda suutelised mistahes (vabal ?) ajal tegema, jättes koordinaattelgedele uhtlaste ajavahemike järel “jälje”, niikui joonlauale.
1905.a. oli tekkinud vajadus luua liikumisteisendused, milles Cartesiuse koordinaadistik oleks märgistatud mingi reaalse kiirusega c , mis eksisteeriks looduses ja millega saaks selgitada köiki ruuminähtusi. Möödeti ära valguse kiirus, mis osutus olevat ca`300 000 km/s. Et seda kiirust kasutada universaalselt, tuli näidata, et see ei söltu ei suunast ega valgust väljastava ega vastuvötja niiöelda omakiirustest (et ei oleks nö. valguse kaasahaaramist tema levikeskkonnas, milleks valguse lainelisuse töttu oletati olevat mingit “eetrit” ).
Nö. puhast katset, kahe ulikiire keha vahel valgussignaalide vahetamiseks, teha ei saa pöhimötteliselt ( Vöib-olla saaks : järgnevais esitatud nn. Einsteini peegelduskatseis kiirete osakestega kaasaegses CERN-i seadmes ? – selles oleks Maa ja osakeste-kiht omavahel relativistlikel kiirustel, kusjuures läbitavad vahemaad oleksid möödetavad ? ).Seetöttu tehti katse nn. Michelson-Morley seadmega, milles nii signaali saatev, peegelduv kui ka vastuvöttev kiht olid Maaga seotult uhtselt kaasaliikuvad. Tösi, leiti, et nn. “eetrit” vähemalt ei ole olemas.
Sai postuleerida, et valguse kiirus on jääv mistahes inertsiaalses taustkehas. Seda tähistatigi c ja loeti signaaliks, millega on vöimalik mööta inertsiaalselt liikuvaid ruume.
03.03. Mis oleks nuud olnud loomulikum ja lihtsam, kui vaid paigutada saadud reaalne signaal c eelnevalt kirjeldatud mudelisse ? koos kindlalt väljakujunenud-möödetud Galilei-Newtoni teisendustega ? // Tonu kinnitab, et neid teisendusi ei ole keegi nö. umbermöödistanud – ja et seda ei olegi vöimalik teha ! //
Teeme seda:
1). Kui kiirus v asub kahe keha vahelisel sirgel, nii et x=ct, siis f(x)=ct(1-v/c).
2). Kui kiirus v moodustab sellega nurga a , siis x=ctcosa .
Galilei teisendused ja ruumi eukleidilisus annavadki teisendused kujul:
x=ctcosa; y=ctsina; z=ctsina; OA=ct;
x`=ctcosa – vt; y`=ctsina/L; z`=ctsina/L; (ct)`=ct-vtcosa/cc;
neis on L nn. Lorentz-faktor.
On kerge näha, et saadud teisendused – on erirelatiivsusteooria aluseks vöetud Lorentz-teisendustega homoteetsusteisendused, teguriga 1/L, kusjuures kiirus v muudab liikuvat ruumi ainult ristsihis kiirusega v , ei tingi aga ei pikkuste kontraktsiooni ega aja dilatatsiooni. Et liikumisega ristsihis elektroni kokkusurutavus ja e liikumisest tingitud efektid elektrodunaamikas kompenseeritakse, näitasid juba 1905-ndal aastal nii Lorentz kui ka Poincare`, ca` 3 aastat enne Einsteini geniaalset ideed: kasutada Lorentz-teisendusi kinnistes juhtides – vabade elektronide liikumise kirjeldamiseks.
22.01.2009
AUTOR KINNITAB, ET MIDAGI UUT EI OLE SIIN PÄIKESE ALL – JA EITAB OMA SUUDLUST ILMARUUMI OLEMASOLUS NING KÄITUMISES !
Rakveres, vabast ajast.
13.07.2008 – 15.07.2008 TONU 0.4.
MOTISKLUSED
01. Relatiivsed ruumid ja vaatleja umbrus.
Määratlenud relatiivsed ruumid R(u) kui vaatleja “umbrus”, vaatlejat V huvitavas ulatuvuses tema kasutuses oleva signaali kiirusega u vörreldavate liikumiste kirjeldamisel, – saame vaadelda juba ruume, mis “vaatlevad” Meid, teatud sfäärilisel konkreetsel kaugusel Meist. Mida suurem on sellise sfääri raadius, seda kauem aega läheks sfääril asuvate “vaatlejate” poolt Meie asukoha ja oleku määramine (näiteks) valgussignaaliga. Selliste sfääride reaalset eksistentsi kinnitab öine tähistaevas.
Tuginedes valiku aksioomile vöime kinnitada, et iga Meie poolt nähtav valgusallikas taevas – on olemasolev ja juba väljakujunenud vastastikustes suhetes Meiega. Sellist stabiilset suhet ei saa vaadelda kaasaegses arusaamas nö. lähimöju printsiibist lähtuvalt,millekohaselt ukski möju ega olek ei saa levida kiiremini kui valgus ning selle möju levik vajab möju kandjat, vastavalt siis ka oleku kohta informatsiooni edastajat.
Kaugmöju printsiip, mille olemasolu vajadust röhutas ka juba Newton, vöimaldab vaadelda mistahes olemasolevat objekti kehana tema umbruses kui taustsusteemis, milles tal on oma kindel “väärtus” (olulisus massi möödult; aktiivsus kiirgajana; jms.) ning oma kindel liikumisolek selles taustsusteemis, – kui väljakujunenud suhteid/vastavusi relatiivses ruumis.
Kaugmöju printsiibi kohaselt oleks Meie liikumisoleku muutus silmapilkselt täheldatav nimelt Hubble` konstandi muutuses, millesse on kodeeritud juba Meie omaliikumise hetkkiirus umbruse R(c) suhtes, kusjuures vastavalt liikumisteisendustele: säilib see nn. astronoomilise punanihke proportsionaalsus, söltuvalt “umbruse ulatuvusest”.
Samaselt on ju määratud ruumis R(c) ka Maa “olulisus vaatlejana”, signaali c ristliikumisele, ning Maa trajektoori määramatus (laialimääritus?) umbruse jaoks, vördeliselt R(c) ulatuvusega.
02. Umbruse R(c) poolt vaadeldav Maa, kui “aeglane elektron” laboris.
Maal on köik monaadi tunnused – kui iseseisva iseareneva susteemi algne vähim osake, kas vaadelda seda siis koos päikesesusteemiga vöi eraldi lähenditena selle sihituses.
Sellisena vöib Maad vörreldagi “aeglase” elektroniga (mitte valguslähedaste kiirusteni viidutega, kuid sellega vörreldavatega), millel on oma kindel hetkkiirus ja pöördimpulss koos magnetväljaga.
100 aastat tagasi esitatud teoorias (mitte vaid hupoteesis !) vaatles A.J.Freznel konkreetseid dunaamikaseadusi ja näitas, et liikumise kiirus absoluutses ruumis AR kompenseeritakse, nii et selle kiiruse poolt esilekutsutud efektid ei näita seda liikumist.
H.Lorentz ja H.Poincare` , tunnistades eelnevat nn. Lorentz-teisendustega, loovad elektroni mudeli, millekohaselt nad tölgendavad efektide puudumist liikumisel “elektroni kokkusurutavusena eetri alalise röhu poolt” .
Taoline tölgendus on vastuoluline – ja seetöttu eksitav : Lorentz-teisendused luhendavad pikkusi ja pikendavad ajavahemikke vastavalt kiirusele v aegruumis R(c) (Lorentz-kontraktsioon ja aja dilatatsioon !) , “elektroni kokkusurutavus” aga nöuab lisaks ruumi R(c) ristsuunalist homoteetsust ?! – vähemalt uks neist nöudeist on tarbetu !
03. TONU leiab, et tarbetud on nii aja dilatatsioon kui ka pikkuste Lorentz-kontraktsioon, sest liikumise ristsihiline homoteetsus kompenseerib efektid ruumiliikumisel JA surub kokku elektroni. Tösi, homoteetsustegur “epsilon” on esitatud ruutjuure-märgina, nii et ruumimöötmed y ja z muutuvad söltuvalt vaatlejast kas siis “kokkusurutuiks” vöi “avardunuiks”.
TONU leiab, et liikumise kompenseerituse selgituseks nii absoluutses ruumis AR kui ka relatiivsetes ruumides R(u) – on tarvilik ja piisav “ainult” ruumi kiirusega ristsuunaline homoteetsus , seega koordinaatide y ja z “luhenemine”.
TONU leiab, et absoluutses ruumis AR, kui seda vaadelda neljadimensionaalse aegruumina, on vöimalikud (ja arvutuslikult samaväärsed) nii Lorentz-teisendused kui ka Ruumiteisendused relatiivsete ruumide R(u) vahel ; mölemad vastavused “mahuvad” Poincare` teisenduste ruhma, milles neljas dimensioon x(0) väärtustub kui “sundmustevahelise intervalli” ( seega: olemasolevatel kehadel toimuvate selliste protsessijadade ruumiline vahemaa, mis on omavahel seotud signaaliga ).
TONU eelistab: jääda ruumiteisendustega R eukleidilisse absoluutsesse ruumi AR , mitte aga arutleda pseudoeukleidilises ruumis L(R), mis on ruumihomoteetne (köigi kolme dimensiooniga) eelnevaga, homoteetsusteguriga L ( kui nn. Lorentz-faktoriga ).
04. Eelistuse intuitiivne arutlus.
Mötisklema paneb nimelt 1905. aasta, mil darvinistlik pseudovaimsus viis eugeenikaliikumises – nii Lenini`ni, kes hävitas demokraatliku Venemaa, kui ka Einsteinini, kes “lihtsa patendiametnikuna” suutis moonutada loodud liikumisteooria ja seisata vaimsuse arengu. Nii “geniaalne Lenin” kui ka “geniaalne heuristiline Einstein” – on vördselt fiktsioonina tökestanud inimkonna, kui iseareneva susteemi, arengut, ning uletavad tavapärase lubatud entroopia taseme, mistöttu on teatud möttes öigustatud nende käsitlemine “revolutsioonilisena”. Ambitsioonikas keskpärasus – hoidku Jumal meid nende eest ! – töepoolest siis juba heuristiliselt !
TONU eelistab oma eriala tundvaid mötlejaid, olgu need siis Marx vöi Trotski, Newton vöi Poincare`, kuid mitte mingil juhul Lenin, Einstein vöi Gustav Naan !
Eelistuse kaalutlusel on määrav roll teleoloogilisel vaagimisel JA otstarbekuse hindamisel.
Poincare` esitatud elektroni mudel käitub liikumisel “kokkusurutuna” ning “tunnistab elektronide elektrodunaamika Lorentz-varianti” – kompenseerimaks nö. omaliikumist absoluutses ruumis. Ruumiteisendused relatiivsetes ruumides R(u) – kuuluvad nn. Poincare` teisenduste ruhma, Lorentz-teisendused sinna “ei mahu”.
20.01.2009
8.07.2008 TONU 0.3. 20.01.2009
VALIKU- elik TAHTEVABADUSEST.
01. Nostalgia.
18 aastat tagasi sain vastuskirja TONU-teemal kirjale. Esitan selle ärakirja.
AKADEEMIK
KARL REBANE 202100, Rakvere
Barbaruse 12
13. juulil 1990. T.Eelvere
200106 Tallinn, Kohtu 6
tel. 451746
Lp. T. Eelvere !
Oma pikas kirjas Teie minu artikli seisukohtadele ( “Akadeemia” nr.3, 1990 )
otseselt vastu ei vaidle. Pöhiline Teie kirjas, kui ma öigesti aru sain, on mure vaimsuse, vaimu, Jumala vaimu pärast, et neid arvesse vöetaks, et just nende kaudu on lootust inimese ja keskkonna kriisist ule saada.
Ma ei vaidle vastu, sest pöhiliselt olen samal arvamusel : on tingimata vaja just vaimsust körgemal tasemel, tugevat usku, sugavat möju ka tunnete, religiooni kaudu. Määravaks asjaoluks on siin tahtevabadus, mis meil kahtlemata olemas on, mistöttu saame rääkida ka vastutusest ja seda nöuda. Tahtevabadus ei allu aga täppisteaduslikule kirjeldamisele, jääb sellest välja, körgemale.
Algselt mul oli tahtevabaduse kohta märkus artikli käsikirjas olemas, kuid kahjuks langes see toimetamise käigus välja. Kui mahti peaks saama, kirjutan tahtevabaduse kohta tulevikus midagi.
Lugupidamisega ………… / Allkiri /
02. Tahtevabadusest surmalaagreis. (( Noore ema nouded “TONU”-le ?!))
A. saatis mulle ilmutuste trukised, mis on koletud ja fanaatiliselt inimvihkajalikud. Kahjuks?! Uldmuljena näen, kuis “Isand” ( mitte Issand, Jumala ainusundinud Pojana ! ) köigis neis ilmutusis talutab kättpidi mönd önnetut, kes peavad nägema surmalaagrites inimeste piinamise ja hävitamise ilmutuslikku igavikustamist mitte uksi ihuliselt, vaid ka hingelt ja vaimult. Peremees-isandale on – pohhui !
Eelnevaga (p.01.) on see seotud mitte uksi nö. täppisteadusliku ebaadekvaatsusega ilmutuslikus ilmas, vaid enim siis tahtevabaduse elimineerimisega sinu paigutumisel krematooriumi erinevatesse kongidesse.
Loeme ( 2. Tunnistus. Lupe. ) : ” Tahan vaid öelda sulle, et taevas ja pörgu on reaalsemad kui see fuusiline maailm, mida me tunneme. See on see koht, kus sa otsustad, kuhu suunda tahad minna; …” .
Loeme ( 6. Tunnistus. ) : “Tal oli ka metallplaat rinnal ja sellel oli kirjas :” Olen siin, kuna olen normaalne.””
Loeme ( 4. Tunnistus.) : “Isand vaatas meid ja utles : ” Vaadake, see on tantsijate palk.” ”
Loeme ( 6. Tunnistus.) : ” Nad köik teadsid, et oli vaid uks isik, kes vöis neid sealt ära saada. Neil oli see lootus, kuigi see oli petlik, vale. ”
Löppkokkuvöttes aga näeme,et köik need eelnevad on ettekäänetena toodud ajendid – pöhjus on :
” Isand utles, et kui Tema omad hoiavad kumnise endale, see takistab Isanda tööd ja evangeeliumi ei saa kuulutada. ” ( 3. Tunnistus. Sandra. )
8.07.2008
03. NSVL TEADUSTE AKADEEMIA , 16.11.1987.a.
TAHKE KEHA FUUSIKA INSTITUUT (Tonu tolkes 14.07.2008)
Lugupeetud sm. Eevere !
Toome endi vabandused vastusega viibimise pärast.
Komisjon, tähelepanelikult tutvunud Teie poolt saadetud materjalide sisuga, tuli järeldusele, et Teie raskused (zatrudnenija) on seotud mitte niivörd burokraatlike kuritarvitustega, kuivörd teaduslikus plaanis lahkarvamustega ja nende uletamiseks on vajalik teaduslik diskussioon.
Austusega : …………. J.A.Osipjan Akadeemik, NSVL TA j.a. töö ja juhtimise stiili ja meetodite täiustamise Komisjoni Esimehe asetäitja .
• TONU 0.2. 26.06.2008
Zenoni apooria sisalduvusest erirelatiivsusteoorias.
01.01. Juba antiikajal hämmastas filosoofe induktiivse loogika kasutamise paradoksaalsus, kui seda rakendati intuitiivsele arutlusele ruumist, ajast ja liikumisest.
Aeg loeti absoluutseks ; ruumi paigutati Vaatleja, kes määras selles ruumis Cartesiuse ristkoordinaadistiku koos juba loodud geomeetria pöhipostulaatidega ja kokkuleppelise möödustikuga ; liikumist vaadeldi kui mingi vahemaa s läbimist selles ruumis ja selle liikumise kiirus v saadi s ja t suhtest. Geomeetria pöhipostulaatidest, kui aksioomidest, tulenes ruumi eukleidilisus. Ruumi loeti pidevaks : punktil puudus ruumiline ulatuvus ; joonel puudus ristsuunaline (normaali) mööde ; iga kahe punkti vahele vöis mahutada löpmata arvu teisi punkte ; joon moodustus punkti liikumisega tasapinnal, jättes endast “jäljena” trajektoori ; sellist puktide-joonte hulka hölmava ruumi vöimsust nimetatakse kontiinumiks .
TONU kahtleb sugavalt sellise punkti olemasolus, kuid on sunnitud sellega leppima, niikui mistahes matemaatiliste kokkulepete puhul, kui need on omaks vöetud aksioomide vöi postulaatidena .
Matemaatikute keeles ei vaadeldagi nii möistmatut asja, nagu “punkt”, eksistentsi, vaid möeldakse välja mingi (ummargune?) punkti ruumiline “umbrus”, nn. löpmata väikese suuruse möistena, mis piirprotsessis (näiteks abstsissi lähenemisel 0-le vm.) omandab väärtuse- ja asukohaga köik olemasolu tunnused. Selline vaatlus öigustab ennast, kui on huvitatus näiteks mingi keha raskuskeskme liikumisest ruumis, ja meid ei huvita keha pöörlemine selles. Ja loomulikult vöime siis arutleda, et selle raskuskeskme liikumisel tekib joonekujuline trajektoor, millel me vöime vaadelda mistahes ajahetkel selle “punkti” poolt trajektoorile “jäetud jälge” : asukohana ja vektoriaalse kiirusena (sellesse ruumipunkti kinnistunud vektorina, erinevalt tavalisest, nn.vabast vektorist).
01.02. Selline ruumi pidevus vöimaldab kontiinumi raames paradoksaalset arutlust nö. “lihtsate löpmatuste” induktiivsest mahtuvusest mistahes ruumiossa. Selliseks näiteks ongi Leibnitzi poolt pakutud “ruumiosa poolitamine”, millel teatud arvu poolituste järel – ei saa olla enam mateeria tunnuseid. Sellist vähimat mittepoolitatavat (ja iseseisvate tunnustega) osakest nimetas Leibnitz monaadiks.
Prof. Ed. Tennmann omistas monaadile ka eesmärgipärasuse, sihituse, ja löi sellest oma ilmavaate (pöhimötte, millega saab köike selgitada, kui on piisavalt andmeid).
Antiikajal tuli analoogse arutlusega välja Zenon, kes “poolitas” järjestikku kaugusi, mida liikumisel läbitakse.
Zenoni apooriate nime all saab töepoolest näidata, et liikumist ei eksisteerigi: Achilleus näeb kilpkonna mingil kaugusel endast ( ju ta siis on seda läbinud joostes teatud ajavahemikuga ) ja ta soovib kilpkonnasuppi; läbinud poole sellest vahemaast, on aga kilpkonn liikunud eemale oma endisest asukohast, …; kuitahes kiirelt ka A. ei jookseks, iga järjekordse poole järelejäänud vahemaa läbimise järel on kilpkonn oma endisest kohast lahkunud. Järeldus : Achilleus ei jöua kunagi kilpkonnale järele – on intuitiivselt väär, kuid induktiivsete
( väikeste järgnevate ) sammude kaupa loogiline. Zenon järeldas sellest, et liikumist ei olegi olemas. Sellist arutluse loogilist sisemist vastuolu ( apooriat ) ei saa lahendada arutluse-väliselt ( demonstreerides auditooriumi ees köndimist vm. ).
01.03. Esimesena rakendas selle apooria vastu matemaatilist aparatuuri Galileo Galilei, lubades ruumivahemaade teisendust mingitele kiirustele
( kilpkonna kiirusele v ) vastavalt.
Sellest : x`= x – vt , ( millest samaväärse nö. ruuminihke avaldis on : x = x` + vt , )kuigi sellise matemaatilise tehte ( samasuses tundmatute ulekannet vördusmärgi “teisele poole” ) öiguspärasust ei mötestata tavaliselt lahti. )
Zenoni apoorias sisaldub aga uhtlasi kaasaegne mötestatus “aegruumist”, milles signaaliks on Achilleuse jooksu- kiirus u , millega ta on möödistanud
( olgu vöi silmaga hinnanud ) esialgse kauguse kilpkonnast kui : x = ut .
Klassikalises ulesandes – kiirrongist kiirusel u ja kaubarongist kiirusel v – on samane lahendus-arutlus :
Jaamade A ja B vahemaa olgu ut , arvutame
a) Kusimus : kuidas “näeb” jaam B kaubarongi liikumist ? – teisendusfunktsiooniga : f (ut) = ut ( 1 – u/v ) ;
b) kusimus : kui kaugel jaamast A kohtuvad rongid ? – pöördteisendusfunktsiooniga : g (ut) = ut / ( 1 – u/v ) ;
c) kuidas väljendub vahemik ut liikuvas susteemis ? – mölema funktsiooni koostoimel : g ( f(ut) ) = ut .
01.04. Abstraktses matemaatikas on vöimalik teostada tehteid, pärimata nende olemusest vöi vöimalikkusest reaalsuses.
Sellest siis ongi tekkinud nn. pseudoeukleidiline ruum, milles aeg on suhteline, pikkused homoteetselt teisenenud – ja ega ikka kusida ei vöi :
mis muudab aega. kas aeg ise, mis jaotab liikumise trajektoori ? vöi kusija ?
02.01. Aksiomatiseeritud matemaatikas peab eriti tähelepanelik olema kasutatava intuitiivse loogika reeglistiku järgimisel ! Hulgateooria – ei saa läbi ilma valiku aksioomita . Miks siis ?
Induktiivne töestus koosneb loogilisest ahelast, alates mingist faktist, vaadeldes järgnevat … ja kui ka siis fakt on selline – alles siis vöib väita et ahela järgnevus on selgitatav leitud reeglistiku kohaselt. Sageli “unustatakse” arutluse loogikast tuleneva fakti, järgneva olukorra, sundmuse vöi vahemaa, olemasolu nöue . See on väär.
Sellise, väära, arutluse näitena toongi siinjuures klassikaliseks (heuristiliseks?) muutunud möttelise katse Paul Kard`i populaarteaduslikust teosest “Relatiivsusteooria peajooned”, prg. 11. “Aja relatiivsus” , lk.41 – 47 .
Toodud on mötteline katse, milles mingil alghetkel (t=0) asuvast ruumikohast O saadetakse valgussignaal “paremale”, ja samal alghetkel väljub punktist O kiirusel v vaatleja O` samas suunas.
Vaatlemiste ajavahemikeks on valitud 1 sekund (lihtsustuseks?) . Töepoolest : valgusfrondi kaugus O`-st suureneb liikumisteisenduse kohaselt ct – vt ; t = 1 ; x`= c – v ; Kuid kaugusele O`B` = ct jöuab valgusfront liikuvast vaatlejast O` ajavahemiku t = 1/ ( 1 – v/c ) järel ! nii et liikuvas susteemis endas liigub valgussignaal ikkagi samal kiirusel – kui … kui ikka on olemas selle signaali vastuvötja, kehal O`, kaugusel ct O`-st. Ja nimelt induktsioonist saame väita, et ka edaspidi kehtivad teisendusfunktsioonid f ja g ,niipea kui meil on vaatlusel selline kiirus v ,mida möödame valgussignaaliga c .
02.02. Valiku aksioom – ongi oma olemuselt nii signaali saatja kui ka vastuvötja olemasolu eeldamine. (Vrdl. Minkowski geomeetriast tuntud “sundmustevahelise intervalli jäävusega” !)
Eelnevas näites tuleb vaadelda nö. jäiku vardaid OB ja O`B` , öigemini nende otspunktide olemasolu ja omavahelist liikumatust.
02.03. Ajavahemike “tukeldamine” , poolitamine vöi suhtelisuse lubamine – ongi laskumine Zenoni apooria paradigmasse, lahendamatusse loogiliselt sisemisse vastuollu, mille lahendus ei ole reaalne, kuigi vöib olla matemaatiliselt kirjeldatav ( näiteks Minkowski geomeetria abil ) .
29.06.2008 , 20.01.2009
http://www.osale.ee , RIIGIKANTSELEI
22.06.2008 TONU`lt : MTU Viru Instituudile .
Alljärgnev – shokiteraapiana Eesti fuusikutele/matikutele ja öpetajatele .
A . Aegade järgnevusest .
01. Alljärgnevates kahes nö. ruumivaatluses ( TONU 1.1. ja TONU 2.1.)
ei esita ma mitte niivörd midagi uut, kuivörd puuan ilmestada 100-aastataguseid (1904 – 05) ilmavaateid : liikumisele ruumis ja Meie kohale relatiivses ruumis .02. Taolist, korrastamist, olen taotlenud järjepidevalt juba m.s. 60-ndaist aastaist, mil esmakordselt tutvusin hulgateooria alustega, millega kohe mitte kuidagi ei saanud, kuitahes kunstlikult, möistuspäraselt kohandada erirelatiivsusteooria neid kaht “geniaalset pöhipostulaati” :
taustkehade olemasolu otstarbetust ja mingi kiiruse (olgu vöi c) absoluutsust – uheskoos vaadelduna .
03. 60-ndad olid NL-s upris huvitavad ajad, seda nii dissidentluse kui ka intellektuaalse arengu seisukohalt . Senimaani oli uldharidussusteemis erirelatiivsusteooria tutvustaminegi keelatud – nimelt nende “inertsiaalsusteemide” suisa mustilise mittemateriaalsuse töttu, mida vöitlev ateism mitte kuidagi endale lubada ei saanud . Samal ajal oli tulemusi andnud Einsteinile omistatud teooria, mille tagajärjel ilmus Pomm – nii “meil” kui ka “neil” . Fuusikud said nöukogulaste käest suhtelise puutumatuse .
Vöitlev ideoloogia ei saa aga kuidagi leppida “vöimalustega” vöi lubatavustega – ning erirelatiivsusteooria muudeti töepoolest heuristiliseks : vaidlusi vöi diskussioone keelustavaks uueks iidoliks . Läänes sai see nö. akadeemilise , meil ametkondliku vaikimise .
04. Eestis oli sellise apologeetika ” isaks ” kurikuulus Gustav Naan , kes viimases hädas (selgitades idealismi materiaalsust) ajas tihti segamini plahvatava Universumi, “Mustad Augud” ja naabrinaise suured tissid . Näideldes hämmastust, huuatas ta : ” Ma ei ole selleks mitte midagi teinud ! Mind lihtsalt on valitud akadeemikuks, Akadeemia presidendiks, ning köik huved olen saanud niisama, ilma minupoolsete ponnistusteta .”
Aeg oli selline .
05. Aeg on alati imelik . Lausa tormilised on olnud aga intellektuaalsed kataklusmid sajandivahetustel .
XVIII saj. löpul toimus prantsuse revolutsioon, mis löppes verise terroriga ;
XIX saj. löpul vöidutses darvinism, toimus demokraatlik revolutsioon Venemaal, mis muudeti XX saj. alguseks pea tervet sajandit kestvaks terroriks : kaltsakad versus rahvas ; eugeenikaliikumine vöidutses nii siin- kui ka sealpool Suurt Lompi, demokraatia omandas “vöitlevas arengus Inimese” – Looduse Kuninga – kurjakuulutavad jooned . Esialgul oli see vöitlus näiliselt suutu : Inimene versus Loodus , millega vaadeldi inimkonna eeliseid ja pealejäämist suurte imetajate ule ning pölluharimise eeliseid . Liialdustest hoidis tagasi – Usk, mistahes religioosses vormis .
06. Loodolendina ei saanud inimene end kuidagi kujutleda “isearenevana” – vaja oli käibelt körvaldada : Jumal .
Kuidas siis seda tehti ? Lihtsalt : väideti, et valguse kiirus on suurim kiirus looduses – ja kadus Jumala ainuöigus loomeks ning “köikjal korraga olemises” jne. jne. . Kosmoloogia ei leidnud enam “kohta” Jumala jaoks, vähemalt selles Suures Paugus ja plahvatavas Universumis . Loodi Suur Pomm .
Sellist vaimset krahhi tugevdas arenev demokraatia, milles määravaks sai keskpärasuse (kui enamuse) uha uuenev vöimuletulek erinevais inimpopulatsioonides .
07. Kokkuvötlikult on eelnevat kirjeldatud ” XX saj. intellektuaalse krahhina “, millest arenes tormiliselt välja EUGEENIKA-LIIKUMINE .
Nimelt see on olnud aluseks vaimuhaigete, kurjategijate ja prostituutide seadustatud hävitamisele vöi steriliseerimisele köigis “arenenud riikides” . NL-s “arenes” see sunnitöölaagriteks, intelligentsi hävitamiseks, holokaustiks ja …
NAISKUSIMUSE nime all – perekonnaseaduse jöhkraks moonutamiseks, millega lapsed olid “Riigi omand” , kasvatatavad NENDE HELGEKS TULEVIKUKS .
08. Fashism vöttis röömuga Tshekaalt ule nii sunni- kui ka surmalaagrite idee ja meetodid : eesmärk oli ju uhtne – inimese “arendamine” sönakuulelikuks juhmiks ja hirmunud olendiks, kellega eliit (aarialased, venelased; kommunistid vöi fashistid) sai omatahtsi manipuleerida .
” Naiskusimuse ” köige vihasemad vaenlased – intelligents ja vanemad – blokeeriti lastekodude ja erikoolide susteemiga, millega korjati sönakuulmatuilt vanemailt nende lapsed . Hirmunud vanemad jäid vait . Nii Alaealiste Komisjonid kui ka -koolid – on alles, niikui alles on siiani laste ärakorjamine … ja ärakorjatud lapsed, orvud elavatel vanemail .
ENAMGI : Eesti vöimulolev eliit – lugedes eestlasi eranditult joodikuiks – reglementeerib juba alkoholi tarbimise aega ?! Varsti tulevad taas laupäevakud ja “kalapäevad” ? – öitsva Eestimaa nimel . Rahva kamandajad panevad aga pidu – rahva vabaduse auks ja hiilguseks . Proosit !
B . Eesmärgist .
01. Minu eesmärgiks ei ole mingi uue teooria loomine, kuivörd iidsete arusaamade lahtimötestamine liikumise kirjeldamisel – ja neist möistuspäraste järelduste tegemine . Oma loomult on see töepoolest enim ehk filosoofilise hinnangu andmine, mitte aga otseselt matemaatiline vöi fuusikaline arvutuslik arutlus . Mötlejana ei nöustu ma päriselt nn. puhaste idealistide arusaamaga : materiaalse maailma olematusest, nagu seda on eestlastele vahendanud prof. Eduard Tennmann, oma ” Hinge surematuses ” , milles ta arendab Leibnitzi ideid . Samas oli nimelt tema uks esimesi Lääne filosoof-teolooge, kes nimetasid endid personalistiks – isiksuslikult isearenevaks monaadiks – kellele andis enese-eksistentsi öigustuse : sihipärasus, eesmärk – teleoloogiline maailmavaade.
A pro`pos : Eestis elas ju ka kuulus embruoloog K. E. von Baer . Väga vähesed teavad, et köigis kaalukais fuusikasönastikes on temanimeline seadus : ” Maa pöhjapoolkeral uhavad jöed endi paremaid kaldaid, mis on järsud, löunapoolkeral aga endi vasakuid kaldaid. ” Sellest tuleneb nn. Coriolise kiirenduse möiste. Laskumata aga selle seaduspärasuse möistesse pöhjalikumalt, tuleb ikka ja jälle pähe möte : kuidas sai inimene, kes sammugi Eestimaalt väljas ei käinud, teada vöi möeldagi – löunapoolkera jögede reeglipärasest käitumisest ?
Ja vaatamegi nuud otsa “kahekroonisele” : näeme teleoloogilist isiksust, kes ei lahutanud oma hinge ei ihust ega Loodusest. Ja vöib-olla on analoogiline eesmärk ka minul, ja Viru Instituudil (?), : arutledes – tarkust taga nöuda .
02. Selles punktis ( B. 02.) ma vabandan, kui rikun autoriöigusi ( kusida luba : http://www.olion.ee !? ), kuid nimelt täna, 23.06.2008.a., lugesin kahest möttekorufeest – nende dualistlikust ilmavaatest, hinge ja ihu uhtsusest, eelistusega hinge surematusele .
Werner Fuld, ” Viimsete sönade leksikon “, Olion, Tallinn 2007 :
= Filosofeerival matemaatikul Rene` Descartes’il (surn.1650) oli äärmiselt omapärane ettekujutus Jumalast ja maailmast. Loomi pidas ta elustatud masinateks, mis funktsioneerivad vaid mehaaniliselt ega saa tunda valu, kuna neil pole hinge. Hinge asukohaks inimesel määras ta käbinäärme. Kehal ja hingel polnud tema arvates omavahel midagi uhist, kui Jumal neid ei läbista. Seepärast rääkis Descartes surres oma hingele : ” Nuud on tulnud tund, mil sa saad jätta vangla ja heita körvale selle keha köidikud. Palju önne ! ” = ( NB ! Vrdl. nn. tuhjade inertsiaalsusteemidega ! )
= Ulmis sundinud fuusik Albert Einstein (surn.1955) öpetas alates 1932. aastast Princetonis, kus ta ka suri. Juba 1948. aastal oli tal köhuoperatsiooni käigus avastatud aordi aneurusm. Seitsme aasta pärast löhkes suur köhuaort, kuid Einstein loobus päästvast operatsioonist : ” Elu kunstlik pikendamine on maitselage. Ma olen oma osa andnud, nuud on aeg minna. Ma tahan seda elegantselt teha. ” = ( ” Ei kommentaari ” ?! )
03. Tegelikuks eesmärgiks ongi ehk : avaliku arvamuse vastuvötlikuks tegemine – teleoloogiale .
Lugupidamisega : TÖNU EEVERE .
20.01.2009
16.07.2008
TONU 0.0.
NEGENTROOPIAST XXI sajandi algul.
01. Vene kosmoloogia koolkonnast akadeemik Vernadski juhtimisel.
Kahjuks ei kirjelda nöukogude fuusikasönaraamatud negentroopia nime all esitatud hupoteesi, mille arendamisega teooriaks töötas omal ajal grupp vene teadlasi ( minu teades edukalt ). Puuduvad koguni viited akadeemik Vernadskile, mis näitab ilmselgelt Einsteini versiooni relatiivsusteooriast “heuristiliselt keelavat” möju – ja sellise vaatluse antagonistlikku vastuolu nöukoguliku ideoloogiaga, mistahes ideoloogiaga.
01.01. Oma ideestikult tugineb see teooria (sellel on oma arenduslik baas) monaadsetele isearenevatele susteemidele teleoloogilises vaatluses. Eesmärgipärasus, sihituslikkus, on mingile terviklikule monaadile hädavajalik – tema eksistentsiks – ja arenguks.
Monaadi iseloomustavad kaks pöhimöttelist seost:
sisemised keelureeglid ja suhe umbritsevaga.
1). Sisemised keelureeglid kindlustavad monaadi ainuomasuse ja pusimise. Ideaalis on selline monaad igikestev ja muutumatu, kuid temale möjub paratamatusega entroopiline hajumine – olemasoleva umbruse informatiivsete möjutuste nö. “läbilöögina” kapseldunud monaadi kaitsekestast, söltumatult keelureeglite rangusest, mis viib loodud susteemi ebakorrapärasustele ja monaadi elementide “sönakuulmatusele”. Mikromaailmas on tavaks seda nimetada osakese elueaks. Sellist monaadi nimetab Vernadski kinniseks isearenevaks susteemiks, milles on peatunud areng, selle eesmärgipärasus.
2). Monaadi arenguks on vajalik avatus: kahepoolne informatiivne ja möjutuslik side umbritsevaga. Informatiivne algne side – on olemasolu mölemapoolne teadvustus, möjutuslik side on nö. kaugmöjuline ja lähimöjuline.
Lähimöjulist sidet vaadeldakse monaadi väljakujunenud vastastikuste olekuseostena, interaktsioonidena, millele omistatakse nende kandjad. Kaugmöju printsiip on kull seatud praeguseks kahtluse alla, kuid nii Vernadski kui ka esitatava autor – eeldavad selle olemasolu, mille informatiivse loomusena ei ole vaja kandjat. Seetöttu oleks asjatu otsida näiteks gravitone (?) kui massi olemasolu teadvustajat. Ideaalis puuduvad sellisel monaadil olemasolu keelureeglid – ja ta laguneb hetkeliselt.
Iseareneva susteemi teleoloogiliseks pusimiseks on vajalik ja piisav: keelureeglite ja avatuse koosköla.
01.02. On ulimalt hästi möistetav, miks Gulagi Arhipelaagis vaikiti selline arutlus maha, sest kuitahes ranged keelureeglid uksinda ei suuda sellises arengupeetuses suletud uhiskonda kuigi kaua hoida entroopilise lagunemise eest juba ainuuksi informatsiooni kaasaegse läbilöögivöime töttu. Ei ole muidugi minu asi (diletandist pensionärina vaeses uhiskonnas ), kuid etnose säilimise keelureeglite täielik eiramine ( näiteks rahva fuusiline lahkumine oma populatsiooni-areaalist ) – lagundab selle rahvakillu kull juba upris siva.
01.03. Negentroopia I seadus: Kullaldaselt piisavas ulatuvuses entroopilises ruumis ( kaoses ) tekivad paratamatult piisava aja möödumisel negentroopilised keskmed, millest kujunevad avatud isearenevad susteemid ja mis korrastavad ruumi. / Löpmatuse olemasolul./
Kosmoloogiliselt avardab see seadus Inimesele antud mötlemisvöime ulatuvust: vaadelda absoluutses ruumis AR olemasolevat nii minevikus, arengus kui ka tulevikus ( oma arengus tulevikku suunduvana ).
/ Vrdl. eesti keelelist “puudust”: tulevikuvormi olematust ! Kusjuures nii indogermaanlastel kui ka slaavlastel see on olemas – olgu siis näiteks vöi need “tuhandeaastased önneriigid” piiblis, fashistidel vöi kommunistidel, – uhesönaga : mistahes eugeenika-liikumise harul. /
Töepoolest. Mistahes iseseisvad susteemid alluvad entroopiaseadusele, millekohaselt mingi aja möödumisel selle susteemi erinevad energiatasandid uhtlustuvad. Tekib kaos: valguse ja pimeduse eristumise asemel on meil hämarus. Sellest seadusest tehti veel möödunud sajandil järeldusena Maailma soojussurma paratamatus.
Siinkohal vöin vaid oletada ak. Vernadski kodanlikku julgust, tunnistamaks matemaatilist fakti: köigi hulkade hulga olematust ! Sellega ei saa siiamaani hakkama ka kaasaegsed kosmoloogid, kes arutlevad mingist kogu-Maailmsest paisumisest ja kokkutömbest – selles “Suures Paugus” ?!
Kui TONU arutleb relatiivsetest ruumidest R(u) absoluutses ruumis AR , siis uhtib ta ilmselgelt Vernadski filosoofilise arusaamaga nn. aktuaalsetest löpmatustest : meid huvitavate ulatuvustega ruumides olemasolevate taustkehade kogumöju vaatlemine konkreetsele Vaatlejale mingil kehal, ning selle Vaatleja paigutuse ja olemasolu möju sellele aktuaalsele löpmatusele. On selge, et mingis kokkulepitud ulatuvuses aktuaalses löpmatuses me vöime tinglikult vaadelda, sellest kokkuleppest tulenevas “huvitatuses”, nö. aktuaalset köigi hulkade hulka, mis mazóreerib relatiivses ruumis sisalduvate hulkade kogusele ja on seega vöimsam selle minoreeriva hulga vöimsusest, ruumidega opereerides niisiis kontiinumi vöimsusega, nende pidevust eeldades. Hulgateoreetiline arutlus on vägagi paslik nimelt kosmoloogias, milles me pöhimötteliselt ei vaatle ju ruumipidevust, vaid “erinevaid helenduvaid objekte”, nende olemasolevaid hulki aktuaalses löpmatuses (astronoomias – nende vaadeldavuses kas siis valguse vöi möne muu kiirgusega).
01.04. Vaatlemegi niisiis uht sellist Vaatlejat, kes on sattunud oma “aktuaalses löpmatuses”, soojussurma olekus, seda hulka maz*oreeriva hulga kiirguse kätte. Materiaalse olemasoluga omastab ta teatud aja vältel selle energiavoo, mis lihtsas induktiivses arutluses annab: kiirguse, mis on vörreldav kiirgusega, mida annaks kogu taevavölvi kattev Päike umber kogu Maa. Omastades teatud aja vältel sellise koguse energiat, et eristuda kaosest, saabki sellest Vaatlejast see negentroopiline kese, mis hakkab ise kiirgama – ” lahutades valguse pimedusest ” ehk korrastades hämaruse. / Vt. Moosese1.1. ja edasi ! / On ka selge, et teatud aja pärast kuhjub kuitahes väike ebakorrapärasus kiirguses – ja Maa saab mingi kineetilise impulsi, kuni ta saavutab nö. loomuliku liikumiskiiruse. Töepärasem on muidugi, et reaalses ilmas vöib omada sellist liikumist ( paigalolekut aktuaalses reaalses löpmatuses ! ) mingi täht vöi tähekogu. mis siis järjekordselt plahvatab.
01.05. Vernadski järgi: mistahes juba väljakujunenud isearenev susteem, monaadina, areneb töepoolest progresseeruvalt, kätkedes selles arengus ilmselt kollapseeruvaid ohte. Inimuhiskonna arengu pusivust aitab säilitada sellise monaadi nö. koguteadvuse vaimne tervis, kuid vöib oletada, et sellest jääb väheks: ikka ja jälle tuleb tunnistada Inimese vöimet, soovi ja vajadust – olla avatud – olla avatud ja vastuvötlik meid ohjavale ja korrastavale informatsioonile meid umbritsevas aktuaalses löpmatuses, mistahes nimetusi me sellele ka ei omistaks. Kaasaegne vaade Jumalale – mistahes vormis vöi usundis – vöimaldab näha Jumalat meis endis. Nimelt selles möttes on kaasaegne terrorist oma vaimult lähedasem kristlasele kui labane vöi koguni ” vöitlev ” ateist, kuigi, eks seegi ole ju usund.
02. Armas pilt töeteel ekslevast Inimesest.
02.01. Monaadsuse olemus ei ole defineeritav, kuid on intuitiivselt köigile arusaadav: isearenev terviklik susteem, mis omab vähimat möeldavat hulka, et kindlustada oma pusivus ja areng. Bioloogiliselt “on inimene loodud meheks ja naiseks ” – ja sinna pole midagi lisada ega ära vötta. Uhiskondlikult on inimesed jaotunud ajalooliselt elujöulisteks populatsioonideks oma areaalides – etnilisteks rahvusteks. Rahvuste pusimiseks on vajalikud nii riiklikud struktuurid, keelureeglitena, kui ka arengut kindlustavad sotsioloogilised institutsioonid populatsiooni arvukuse ja harituse edendamisel. On paha, kui Riik omastab ideoloogiana (keelustamis-käskimisena) sotsioloogia, peatades sellega arengu. Uhiskonna arengu uldisemas möttes kindlustavad isiksused, kes etnoseväliselt soovivad ja suudavad iseendid harida – ja kellel on selleks nii aega kui vara – olgu see siis aristokraatia vöi kaasaegne haritlaskond/intelligents. Kuid sellest jääb väheks: on vajalik, et see isiksus ka töepoolest avaks end uldsusele. Juba Tarkuseraamat utleb: mis kasu on sul sinu tarkusest, kui sa vait oled ? – sa oled ilmaaegu vaeva näinud. Kas ja kuivörd lugeda Isiksust monaadseks, jääbki ju tema umbruse otsustada, kas siis lubades tal end arendada ja avaldada vöi mitte.
Prof.Ed. Tennmann löigi sellekohase ( minu arvates mitte täiesti korrektse ! ) maailmavaatelise termini: personalist. Sellise nimetuse keeleline möte on tema enda maailmavaate määratlusega vastuolus: ilmavaade – kui veendumused ja usk, millega isik puuab seletada lahti köike maailmas toimuvat ja olevat. Oma teoses “Hinge surematus” avaldub autori isiksus enim siiski ehk teleoloogilise teoloogina, kellena TONU teda ka vöttis ja aru sai. Isiku, persooni, ainsuslik monaadsus on egotistlik – ja ehk seetöttu sai autor ka terava kriitika osaliseks teiselt isikult, Uku Masingult.? TONU ei loe end kompetentseks lahti mötestama viimase arutlusi, kuid lubab endale vabaduse kinnitada oma hämmastavat tödemust, kui sai Masingu käest teada, et eesti keeles ja meeles (!) puudub nii tulevikuvorm kui -nägemus.
02.02. Mis siis on nii hämmastavat sellises tödemuses ja kas see on aktuaalne ?
Keeleliselt on selline “puudus” fakt, mida muuta ei tohi, niikui kunstlikult on eesti keelde smugeldatud enneminevik kujul “on olnud”.
Meeleliselt näitab selline “puudujääk” ilmselt eestluse ilmalähedust ja -tunnetust. Töepoolest, olemasolevas ei ole kunagi olnud ega tulegi midagi tulevikulist, kuitahes kausaalselt me olnud ja olevaid olekuid (liikumisi) ka ei tölgitseks. Kausaalsus, kui pöhjuslikkuse ulekanne inimmeelde, on enam kui kaheldav. See on nimelt uks neist induktiivse arutluse ulekandeist intuitiivsele mötlemisele, mida teha ei tohi. Aktuaalne on selline väide aga just siin ja praegu, sest ikka ja uuesti asuvad “suured rahvad” arutama “helget tulevikunägemust”, olgu siis G7 vöi G8 kohtumistel, vöi “rahu eest vöitlemisel”. On julgustav, kui sul on seljataga terve (väike)rahvus, kes tuhkagi ei pea tumedast tulevikust, vaid vapralt astub sellesse sisse, tulgu vöi törva !
Ennustuslik tulevikunägemus on ju Vanasse Testamentigi sisse kodeeritud kui tulevikus kindlalt toimuv. Uus Testament seda nii kindlalt ei väidagi. Nii loeb näiteks TONU upris kergekäeliseks piiblitölkeid, mis väidavad et Jeesus olevat Töde. Täpsem, utleksin et luterlikult eestipärasem, on Jeesuse sönad: ” Ma olen Töe Tee.” Armastuse Tee, mis ei ole öigetele, vaid vaevatutele ja patustele, lapsemeelsetele nende töeotsingul.
Kas Euroopa Liidust kujuneb monaadne isearenev susteem ? – jäägu tulevikuennustajate möistatada, kuid arvan, et oma keelelise meele peab Eesti kull teistele teadvustama, olgu vöi tukid taga,
20.01.2009
MUSTA MUDEL.
Musta (värvi) mudel on ammustilma teada: see on pallikujulisele kerale sisselõigatud auguke. On kerge näha, et selline “pallike” kõlbab nii elektroni e kui ka grandioossete Mustade Aukude kirjeldamiseks.
Vaadeldes e kui 2 footoni poolt kiirusel c tiirlevat “pallikest” – ei saa me kuidagi neid footoneid vaadelda “lahus” ruumiosast, mille ümber nad tiirlevad. Niipea kui me seda (kasvõi mõtteliselt) teeksime, kaoks “sisu” olemus (see liituks ju koheselt ümbritseva vaakuumiga!) ja footonid kaoksid kiirusel c “laiali”. Tervikliku mudelina aga saab neid koos vaadelda kui “mateeria algosist”, millel on oma kindel inerts/mass (kindluse annab nimelt footonite “sisemine kiirus c”) ja suvaline joonkiirus.
Statsionaarses Maailmapildis on täheldatavad kolossaalsed tähtede-kogumid, milledel on oma (kärg)struktuur. Lõpmatuses saab kindlasti näha ka selliseid moodustisi, mis oma loomult on kerakujulised, kuid millede kerapind ei ole pidev (ei ole “tihe”). Ja nüüd tarvitsebki vaadelda sellist moodustist (Maalt) – et näha Musta Auku – millesse valgus küll “sisse läheb”, sinna aga kui püünisesse kinni jääb. Seda me näemegi “mustana”. Selline “pall” meelitab kindlasti “endasse sisenema” ka teisi massiga osakesi – ja kiirenevalt.
Antud juhul ei kõnele ma meelega “materiaalseist osakesist”, sest oma mudelis leppisime kokku ju “pallikese” ja selle “sisu” ühtsusest – kui massist.
Siin, enne ja edaspidi – pean ma ikka ja jälle endalt küsima: milleks selline arutlus? Ja ikka ja jälle püüan vastata: et näidata “organiseerituse” (kui arengu) tunnetatavust/mõõdetavust. Näiteks me ei saaks ju mitte mingit liikumisteisendust kirjeldada, kui meil puuduks Vaatleja: tunnetaja/mõõtja – mingi reaalse Signaaliga.
Eks ikka see retooriline küsimus/vastus: miks siiski pidas Newton vajalikuks postuleerida Absoluutse Ruumi olemasolu? Vastates sellele: et eristada seda “absoluutsust” (kui matemaatilist abstraktsiooni ruumist) – relatiivsetest ruumidest, mis “mahutavad/sisaldavad” reaalselt olemasolevaid kehi. Loomulikult lubab relatiivsusteooria mõtteliselt samastada Maad sellises Ruumis Vaatlejana, kuid Newton ilmselt eeldas (postuleeris) Maa omaliikumist mingis “avaramas” ruumis – ja sellest täheldatavaid efekte. KUI selleks pidada Hubble`i punanihet – saamegi ju “teada” Maa hetkkiiruse selles Absoluutses Ruumis /NB! Reaalselt eksisteerivana ERISTAN siinkohal nimelt Aktuaalset Absoluutset Ruumi! Cartesiuse Ruum – on juba liialt abstraktne ja “pole huvitav”./
…….. kohtumiseni!
Vaade “sissepoole”.
Kunagi lapsepõlves ma olin tõsiselt hirmul: kujutledes ruumi “tihedana” mitte üksi aktuaalses lõpmatuses, vaid nö. sissepoole, milles kontiinumi võimsus tõi esile hirmuäratava pildi “teises mõõtkavas” galaktikaist, päikesesüsteemist – ja inimestest, tillukesist… .
Mis siis nüüd teisiti on? Lihtsalt veendumus, et “olematuseni” ei anna mitte kuidagi ruumi “peenendada”! Vaatleme siinjuures vaid kaht võimalikku mudelit: footonit ja elektroni.
Kaasajal kujutellakse footonit endale ette kui mingit “ketast”: kahemõõtmelist kämpu, millel on oma kindel polarisatsioon; kindel sirgjooneline (pao)kiirus c; ja millel on “lainepaketi”-efektid. Tõepoolest: kujutledes footonit “kahe mingi kvaasiosakese tiirlemisena” ümber nende mõttelise keskme – me ei saagi näha muud, kui “lainelisust” – kui tõenäosuslikku “olekut” siin-/sealpool tema trajektoori. Olukord aga muutub radikaalselt, kui me “toome mängu” 3-nda ruumimõõtme: sellises ruumis footon “käitub” juba mitte kui lainepaketike, vaid liigub “spiraalselt” – ümber oma trajektoori. /Piltlikult näib see, kui mingi “kaksik-genoom”, mille tõenäosuslikud ruumiolekud on “kivistunud” – paigalseisu./ Footonil on: kindel kiirus c, kuid “vaba” lainepikkus (sagedus; tiirlemiskiirus või siis radiaalkaugus “tsentrist”).
Elektroni me ei saa samuti vaadelda mingi “kettana”. Vaatleme seda siis “tiirlevana” kahest osisest (nüüd juba reaalselt olemasolevaist!), milledel on kindel tiirlemiskiirus – ja vaba kulgliikumine. Miks mitte kujutleda neid “osiseid” kui kaht (eri-)polarisatsioonitasandil seotud footonit?! Kujutlusvõimele jääb siin küllaldaselt ruumi, et defineerida “massi” mõiste, et seostada selline “mass” nö. mateeria algosisena?! jne.
………… Tänaseks aitab!
1. Leibnitzist, Zenonist ja Ruumi kontiinumist.
Lapselikult vahva, kuis Ruumi kontiinum-võimsus võib siduda “materialistist Leibnitzi” – läbi Zenoni apooriate – Absoluutse Ruumi pidevusele, koos võimalusega mahutada Ruumi erinevad mittetühjad inertsiaalsüsteemid; ja kõik olemasolev, alates hüpoteetilistest (virtuaalsetest) osistest, millest võime luua mistahes elementaarosakese mudeli, – kuni hiidgalaktika-parvedeni suhteliselt liikumatus kärgstruktuuris.
Leibnitzi lihtne arutlus “poolitab” mistahes materiaalse (taust)keha, viies sellise poolituse – absurdini: kuivõrd tilluke saab olla (veel) materiaalne osake?! Zenoni arutlus on vastupidine: poolitades liikuva keha trajektoori lõpmatuseni, jõuame tulemuseni, milles liikumist lihtsalt ei saagi olemas olla?! nonsenss!
Ja eelnevast on suisa piltlik vastus Newtoni (näiliselt retoorilisele?!) küsimusele: milleks siiski ta pidas vajalikuks postuleerida Absoluutse Ruumi olemasolu?!
2. Mittetühjade hulkade “mahutamisest” Ruumi.
Absoluutne Ruum on iseendast selline matemaatiline objekt, millega me ei oska ega tahagi midagi ette võtta. Primaarsena kujutleme vaid ette, et võime sellesse ruumi “paigutada” (“paigutuda”) mistahes kohta mingi Vaatleja, kellel on “võime” selles Ruumis arutleda: määratleda selle Ruumi orientatsioon; dimensioonid, koos juba orienteeritud Cartesiuse ristkoordinaadistikuga; vaadelda/mõõta selles ruumis liikuvaid kehi ja nende kiirust … .
Selliselt postuleeritud Absoluutne Ruum – on nö. aegruumiliselt pidev, võimaldades “mahutada” endasse kõik olemasolev; ja liikumine selles on “mõõdetav” nn. mõttelise “jäljega”, milleks loetakse olevat suuteline jätma Ruum, kui selles liigub mingi keha /analoogia lennukite “sabale taevas” – on ilmne ja sihituslik!/
3. Relatiivsetest “aktuaalsetest” ruumidest Absoluutses Ruumis.
Et arutleda Makromaailmas, tuleks meil määratleda (anda sisu!) nn. aktuaalsele lõpmatusele – Ruumile, “mis meid huvitab” ehk milles me saame ruumivahemikke mõõta, meile kättesaadava signaaliga. Käesoleval ajal on selleks signaaliks valitud valgussignaal (vm. el-magnetkiirgus) kiirusel c, nii et “aktuaalseks” saab lugeda ca` 14 miljardi valgusaasta-pikkust kaugust – Meist, kui Vaatlejast. Tõsi, see “viib meid tagasi” nö. geotsentrilisse maailmapilti (arutluse otstarbekast lihtsustamisest!), sest heliotsentrilist relatiivset ruumi me saame küll arvutada, kuid Meie/Vaatlejana – on arukam.
On ilmne, et “meie” all võib tinglikult vaadelda Maad, soovi korral füüsikuid, kes mõõdavad Ruumi. Tinglikult võime ju ka vaadelda mistahes makro-liikumist: sirgjoonelisena, mistahes arvestuslikus ajahetkes, eraldi võetuna. Sellises Ruumis saame eraldi vaadelda nn. inertsiaalsüsteeme: omavahel liikumatuid olemasolevaid kehi, koos “neid hõlmava” aktuaalse lõpmatu ruumiga – näiteks Maa suhtes (praktiliselt) liikumatute kehade koguhulka. Kosmilisest vaatevinklist on meil selline “piiritletus” võimalik: “alates teatud vahemaadest” ( näiteks meie Galaktikast), mil (veel) ei avalda mõju nn. Hubble`i punanihe – kuni sellise punanihke “määravuseni”. Mida selline (lapsik?) määratlus sisuliselt tähendab?
Hetkkiiruste kokkuleppelisuses tähendab see, et me vaatleme nö. Maa “omaliikumist” – koos Galaktikaga, kui “paigalseisu”. Mõõdetavad on vaid “lähedased” liikumised, nagu Kuu ja teiste taevakehade liikumised – mõõdetavaina nn. Doppleri pikiefekti kaudu: eemaldumine annab (esimeses astmes) punanihke. “Eemaldumisel” (vaatluste avardumisel) – suureneb see ruumi aktuaalsus – ja “Maa kaasa-haaramine komplekssesse liikumisse” koos teiste galaktikaparvedega. Viimane liikumine on ilmselt “kiirem”, nii et määravaks muutubki Maa hetkkiirusest mõõdetav (Doppleri ristefektina, kui teist järku suurusega!) Hubble`i punanihe – see on võrdeline kaugusega Maast.
……………. Jätkan mõni teine kord!
Kuule, jehhi: jälle mul keegi virutab ära köik mu google ja facebokki parroolid?! Äkki teed korda, veelkord?!
Ilmar! keda enam pole.
Alati ma jään kuhugi hiljaks. Ju siis olengi säärane, pikatoimeliselt mölgutlev tolvan, kes iseendaski selguselejöudmiseks sajandeid vajaks.
Süüvides minevikulisse aegruumi: näib, nüüdseks, et olid vist ainus, kes end minu söbraks lugeda vöis – ja kahjuks (?) selleks ka jäi. Mis meid siiski nii pikaks ajaks lahutas? Oli see ainult ruumiline vöi spetsiifiliselt ajastikuline vastandus?!
Tagantjärgi tunnetan kogu oma loomusega: Sina olid minust targem, möistvam ja andestavam. Meie esimene vastandus (kaks ju neid ülepea oligi!) tekkis, kui mina “armusin” Sinu öesse. Kaks lollikest, koolilöpupeol, täis hurmavalt lehkavat kevadet ja esmast suudlustki. Mis siiski juhtus, selle puhtuse-puhanguga?
Naeruväärselt tösi: mul ei olnud midagi selga panna, et jätkata kohtamisi!? SEDA aga ma Sulle ju ei könelnudki, kordagi mitte; meil oli 4 venna peale 1,5 paari kingi… .
TPI mulle ei istunud – mind hakkas huvitama “puhtam matemaatika”, otsimaks seda, mida ju siianigi jahin, teadvustunult vöi mitte. Edasine Sul ju teada: köikehävitav armastus, mis haaras mu jäägitult, koos rinnus rabeleva südame ja ootamatult purskuvate pisaratega. Seal Sa siis ju küsisidki: “Kas armastan Su öde?” – jah, kuid mis see siis ka on? – pani Sinugi mötteisse.
Möödus aastakümneid, mille kestel ma ALATI teadsin, kelle poole vöin viimaseski hädas pöörduda, tarvitsemata midagi selgitada.
Vajadus selleks tekkiski, kui läksin teravdatult vastuollu tollase riigi pöhitoega: KP juhtide möttetu mölaga, millele ma ka NENDE endi tähelepanu juhtisin. Kuidas aga karistada endist lastekodulast, , kellel “kasvatusvigu” olla ju ei saanud? Löögi alla pandi mu poeg, kellel keelati edasiöppimine keskkoolis, ja tütar, kes ühemötteliselt minu poolele asus. Rakendus Krupskaja “loodud” NLKP määrus “Naisküsimusest”, mis AAK-de vörgustiku kaudu kasutas laste vägivaldset ärakorjamist perekondadest. //See süsteem toimib siiani! – nüüd küll “peenema” nimetuse, eugeenika, nime all!// Rakendas seda sisuliselt KGB vastav “osakond”.
Sa olid kaasatundev, koguni sedavörd, et helistasidki “oma kaastöötajaile” (?!) KGB ohvitseridele, nende juhtkonnast. Abi sSa ei saanud – ja tütar viidigi Kaagverrre, tütarlaste sunnitöölaagrisse, kelle tööst elatus juba tollal, elatub siiani (!) terve asula.
Kas olin öige, kui katkestasin Sinuga suhted? Ei jätkanud neid ka mitte pärast rahutult valjut revolutsiooni? Mulle näis see öige, sest AAK-d jätkasid oma “tööd”, jätkas möju ühiskonnale see “naisküsimus” – ja vöimule tulid ikka needsamad paadunud kommunistid ja nomenklatuur. Ohtlikuks pidasin ju Sindki!?
Kas vöi kumb meist siiski osutub öigeks, nüüd siis juba aastate-tagant? Vöi kas selles ongi mingit lahendit, ei tea. Igaljuhul nüüdseks on eugeenika-meetodid muutunud palju rafineeriuimaks – ja tegusamaiks! Minu “Kaagvere-tütre” rase lapselaps paigutati “tema soovil” vanglasse, pärast seda kui talle juba alaealisena hakati inkrimineerima köikvöimalikke “kuritegusid”.
Viimasest juhtumist soovisingi Sinuga vestelda – ja selgus, et oled hoopis “mujal”.
Kahju jah! Aga äkki kohtume veel!?
Hää on, kui hästi tantsid, parem veel kui paigal püsid.
Liikumine – hää;
Paigaolek – pähh.
Erirelatiivsusteooria peamiseks köneaineks on nn. kiirused v ja (v – V, mis on nö. “vörreldavad”, möeldes selle all nende otstarbekat suurusjärku, mis annab möödetavate möjude mudeli. Üheks sellistest mudeleist on toodud P.Kardi “Relatiivsusteooria peajooned”, lk.141-142., joonisel 32. ja valemeis(33.3) kuni (33.13). Joonise 32. vöib lahtimötestada: kui laserikiire saatmist, mingi nurga w all, kiirusega v liikuvale peeglile /antud juhul liigub peegel “paremale”./ P.Kard vaatleb teravnurka w, sellist, mille puhul nurk w oleks väiksem kui 90 kraadi, näitamaks Doppleri ristefekti nn. punanihke määravust ka nö. “lähenemisel”. Autor arvutab välja nn. piirnurga w, mille puhul negatiivne efekt “alguse saab”. Lahkume aga erirelatiivsusteooria tölgendusest (nn. algebralisest arvutusest) ning vaatleme vastavust liikumisteisenduste möttes, milles funktsioonid rakenduvad – ainult ruumilistele vahemaadele (tösi, möödetuina signaali c kiirusega). Tähistame: f(ct) = ct(1 – (v/c)cos w) ja f(y) = ct/L. Ilmselt niisiis “piirnurk” “algab”, kui f(ct) = f(y). On selge, et piirnurga w “lähenemisel” täisnurgale (peegli nö. normaalile) – saabki efekt olema negatiivne – ja jääb negatiivseks ka “eemaldumisel” (intuitiivselt seega: piirnurgast w alates – jääb Doppleri ristefekt negatiivseks, üksköiksena f(x) teisendusfunktsiooni nn. vastandfunktsioonidele f(+-x). Miks see siiski nii on? Enamgi veel: me saame väita, et “alates piirnurgast w ” – hakkab peegel laserikiirt peegeldama ainult peegli normaali-pidi!
Sellise selgituse andis 1905-ndal aastal A.Einstein nn. peegelkatses, Vt. “Füüsikaentsüklopeediat” 1984, vene k., lk. 869. Eelneva arutlusega ühtlustamiseks peame aga A.E. antud mudelis vaatlema liikuvat peegelpinda – liikuvana normaaliga risti. Osutub, et kiiruse v kasvades (lähenemisel c-le), väheneb peegeldusnurk w, saades “teatud kiirusest alates” 0-ks, ehk siis peegeldub rangelt piki peegli normaali, tösi, suurenenud ringkiirusel ja körgemal energeetilisel tasemel. Viimasest saabki arvutada ka peegli enda liikumiskiiruse.
Selline, nö. liitmudel, ei ole saanud kajastamist nüüd juba üle saja aasta, sest “vajadus” selleks on puudunud: vaata, kuidas “ühtlustuvad” kinemaatikas nii erirelatiivsusteooria kui ka Liikumisteisenduste valemid! Kuid järeldused – ja liikumise lahtimötestamine, nö. liikumis-filosoofia – on vastupidised! Näibki ääretult imelik: miks ei arendanud Einstein ise edasi enda poolt väljaarvutatut selles peegelkatses?!
Ülepeakaela? – oh ei!
Minu väide: relatiivne liikumine on invariantne relativistlikus kirjelduses, mistahes kiirusega “c” signaaliga “meie” ka poleks möödistanud vahemaid (ct) iseenda ruumis.
Irriteeriva vahepalana esitaksin siinkohal ühe meenutuse noorusest. Nii ju taadud teevadki, pahatahti liialdades sellega. Meenub, kuis väikese titana söitsime Linna (elasime Hiiul) – kas siis emale “appi” tema töökohas, trükimasinaga toksides, vöi koguni Maiasmokas “napoleoniga” end määrimas. Asjakohaselt aga mäletan, kuis ema ALATI mul kövasti käest kinni hoidis (tehke köik nii!), kui vahel elektrirong “läbiv” oli, kihutades peatumatult meist mööda. Möödusid söja-aastad, ka nn. Tallinna pommitamine; möödus lapsepölv – ja vast keskkoolis käima asudes, Linnas, taastunnetasin seda suisa füüsilist tömmet möödakihutava rongi poole – see ei olnud lihtne meenutus, vaid reaalsus. Kuidas seda kirjeldada? Usun, et seda on tunnetanud köik reisijad, kuid keegi pole sellele tähelepanu osutanud. Massivse keha kiire möödumine – peab olema seotud (mitte gravitatsiooni vöi ehk koguni Coriolise kiirendusega, seda inimene ei tunnetaks!) – ruumilise interpretsiooniga. Harjusin sellega kui “nii see lihtsalt on” olemasoluga ja unustasin. Kuniks. Kuni taaskohtusin selle tunnetusega kaevanduses, eriti teravalt pärast lühikest puhkust: “uudsuse völu” maa-aluses ruumis seostus taas “külgetömbega” mööduvate täislastis pölevkivirongide poole. Lisaks oli ju meil niikui nöögiks öppekavas ka Lorentz-teisenduste laiem lahtimötestamine. Suisa köhedus tuleb peale: SELLEST ON MÖÖDAS 50 AASTAT!
Praegu ma tean, et seda “tunnetasid” ka teadlased 100 aastat tagasi (oh, mitte elektrirongidega ega mitte ka füüsiliste aistingutega?!) – möötes “aeglaste elektronide” liikumist, füüsikalaboratooriumis (kui “meie” taustruumis). Üksikasjaliku teksti-tölke sellest esitaksin järgnevas üllitises. Seni aga pööraksin – kelle tahes – tähelepanu faktile, mis hämmastab akadeemilist teadust siiani, sundides neid fantastilistele kujutlustele liikuvate kehade “duaalsest loomusest”: kui “laine-osakestest”?!
Esimene katse seisneb “aeglaste elektronidega [e] ” ekraani “pommitamises”, milles on teatud möötmetega “auk”. Elektronid, läbinult ava, moodustavad sümmeetrilise pildi ekraani taga olevale fotopaberile – nö. interfereeruvad, hajudes rigikujulisteks röngasteks. Selliselt käituvad ainult lained, nii et tehti katseid ka e trajektoorile ettepaigutatud vardaga – diferents säilus. Et kindlustada sellist “jama” – paigutati e-de teele “vörk” – nö. “avati e teekonnal 2 ava” – elektronid käitusid ikka niikui lainetus – difrageerudes, kuigi elektrone suunati kuitahes erinevate ajavahemike järel. Et aga e ON kindel osake, pidid teadlased nentima, et “jama” pöhjus ongi elektroni enda loomuses, mis olevat teadmata pöhjustel vahel osake, vahel “niikui laine”. NB! Kalibreeritud e-de trajektoor annab aga alati fotopaberile “punkti”, KUI TEDA EI SEGATA.
Laskumata duaalsuse apoorilis-filosoofilisse arutlusse vöi selle kriitikasse, näitan, et minu poolt esitatavad liikumisteisendused (Lorentz-teisendustega ruumihomoteetsed, sihil v) – annavadki “töenäosusliku trajektoori kiirusega v ristsihis” (nii y kui ka z teljel, kui x-telg asub kiiruse v sihil). See kehtib mistahes osakesele/kehale, söltumatult selle liikuva keha olemusest, söltudes aga otseselt kiirusest v endast, ja signaali kiirusest c , millega on möödetud ruum, milles e liigub kiirusel v.
Liikumisteisendused, mis säilitavad Galilei teisendused sihil v, muudavad liikuva keha trajektoori homoteetsusteguriga 1/L, milles L on nn. Lorentz-faktor: y´= (+-)y/L. Ruutjuuravaldisena – annab selline teisendus “kahetise pildi”: kokkusurutuse nii y (z) nö. plusspoolel kui ka miinuspoolel – tasapinnal niisiis korraga nii sektorites I. ja IV. (vöi siis “möödumisel vaatlejast” – II. ja III. sektoris.)
Vaheaeg!
Alus: Füüsikasönaraamat, vene k., Moskva, 1984, lk. 510. lk. 508-509, üldisemalt.
“Relatiivsusprintsiip ja teised invariantsusprintsiibid”
Relatiivsusteooria tugineb relatiivsusprintsiibile, millekohaselt mingis füüsikalises süsteemis, mis on viidud vabasse ühtlasesse ja sirgjoonelisse liikumisse – vastavalt nn. tinglikult nimetatavalt “paigalolevaks” süsteemiks suhtes – Vaatleja jaoks, kes asub liikuvas süsteemis, köik protsessid kulgevad täpselt samamoodi kui paigalolevas süsteemis. Seda fakti sönastatakse kui loodusseaduste invariantsust -liikumisteisenduste suhtes. Termin “relatiivsusprintsiip” ongi seotud sellega, et kui allutada/kohaldada liikuvate kehade süsteemile liikumisteisendusi // matem.: rakendada liikumisteiendus-funktsiooni!//- siis säiluvad köik selle süsteemi suhtelised liikumised muutumatutena.
Eelnevat on vaja nö. tölkida tavakeelde, et kaoksid kaksipidi arusaamad. Vöi nagu öeldakse: täites rangelt matemaatilises arutluses ühtset loogikat – ei saa olla tulemuseks vääraid vastuseid, kuivörd saab esitada vääraid küsimusi! Köige ilmekamaks näiteks ongi ju nn. “kiiruste liitmise algebraline vorm” erirelatiivsusteoorias, vt. seost (3), lk. 510 . MEIE tähenduses on see ümberkirjutatav seosena: v* = g(vt – Vt); intuitiivse tähendusega: “Kuskohal, M jaoks, kohtuvad A ja K – kui nende omavaheline kiirus on (v – V)?” KUI aga M tahaks töendada reaalset relatiivsusprintsiibi kehtivust ka nn. kiiruste liitumisel, tuleb vaadelda suhtelist kiirust v* liikumisteisendustes ehk seosega: f[g(v – V)] = (v – V) … ja nimelt selles seinebki “keeleliselt öige relatiivsusprintsiibi tölgendus”!
Kas liikumist ülepea olemas on? Terve möistus ütleb meile, et on küll. Kuid ruumi ja aja pidevusest, nende nö. kontiinumi-vöimsusest, esitas Zenon oma kuulsaima apooria Achilleusest A ja kilpkonnast. Sisuliselt on see aegruumi tükeldamine/poolitamine: kui mingil ajahetkel Achilleus jöuaki sinna kohta, ruumis, kus esialgul oli kilpkonn K, on see sealt aga juba lahkunud. Loogiline arutlus, mis vajas matemaatilist lahendust. Sellise lahenduse andis Galilei, liikumise kirjeldamisega teisenduste abil. Kaasaegse kuju andis neile teisendustele Newton, nii et praegu neid nimetataksegi Galilei-Newtoni liikumisteisendusteks.
Teisenduste kuju: x´= x – vt; y´= y; t´= t. ………. (1) vajab nö. lahtimötestamist. Newton ise pidas vajalikuks eristada taustkehasid: hölmavaiks ja nö. punktmassina käsitletavaid taustkehi. Hölmavaks taustkehaks pidas N. nö. MEID, M, olgu siis füüsikalaboratooriumina vöi selle laiendusena – kui Vaatlejaga absoluutset ruumi, meie näites niisiis Maad, millel liiguvad nii A kui ka K. Iseenesest-möistetavaks pidas N. – teisenduste loomisel – nii M kui ka liikuvate A ja K olemasolu, eeldades seda. Arutluses, nö. ruumis M, eeldas N., et me vöime Vaatlejana paigutuda mistahes ruumiossa M-s. Teisenduste lihtsaima vormi saame, kui paigutume vaatlejana V – A ja K ühendavale sihile. Valime mingi alghetke t = 0, mil A alustab liikuvale K-le järgijooksmist. Meie paigutuses vöime neid liikumisi vaadelda Cartesiuse ristkoordinaadistikus, teljel x. Klassikalises kiiruste liitmises (nii A kui K eemalduvad Meist, asukohaga x=0) niikui t(c – v), milles c on A ja v on K kiirused. Saamegi liikumisteisenduste kuju, sihil x: x = ct; x´= x – vt; … (2)
Kasutades kaasaegset, aegruumilist, köneviisi, vöime ühitada seosed (1) ja (2) : f(ct) = ct(1 – v/c); …… (3) On kerge näha, et KÜSIMUS: Kuskohal, Meie jaoks, saab Achilleus Kilpkonna kätte – on vaid liikumisteisendus-funktsiooni f pöördteisendus-funktsiooni 1/f kirjeldada ehk “A saab K kätte kohal: x*= ct(1/f) =ct/(1 – vt) … (4)
Eelnev oli sissejuhatus – kaeme teinekord edasi!
Welcome to WordPress.com. This is your first post. Edit or delete it and start blogging!
Saatana advokaadina esinen (siin) “Einsteini kaitsjana – tema PEEGELKATSE tõlgenduses – tema enda ees: //vene k., Fizitsheskiy entzyklopeditsheskiy slovary, Moskva, “Sovetsk…
Allikas: Lihtsuse võlud ja vaevad
ANTI mulle (vastuväitena?) eksplikatsioon Kujutavas Geomeetrias (Tänan!):
milles GEO on absoluutne Kera – ja Signaal Seal on (isegi mulle antuna!) adjuktiivsena ANTUD.
#IonMurgu – on “süüdi” ses, et juhatas mind LIIKUMISEST – PSEUDOLIIKUMISSE!
LIHTNE (?) on näidata (Valguse põrkereflekse arvestades!):
KERA “põrkereflekse”, teades eelnevalt juba “klassikalisi peegeldusseadusi”.
Vaadelgem aga KETAST, mille (lõpmatu) “Ääre-veer” peaks peegeldama “sureliku inimese” Valguse Signaali. Juba Einstein näitas: EI KEHTI PEEGELDUSSEADUSED!
AGA:
MIKS (siiski) kehtivad Geomeetria Seadused? – lollustest sõltumatult?!
Konstantidest kompileeritud, “pii”-ga ümardatud, “iseenda pseudomoonutus” – Lorentz-teisenduse “efemeersusest”!
Asendagem Lorentz-tegur L, “loomuliku teguriga täisnurksest kolmnurgast {vt; k(ct); ct} – nii et k = 1/L.
Näeme: Pole vaja kunstlikke mudeleid, millest mudeli loojailgi aimu pole!!!?
Allikas: Pi Day and Einstein

A new year, a new set of resolutions. Writers and artists on WordPress.com tell us their most important goals for 2016.
A new year, a new set of resolutions. Writers and artists on WordPress.com tell us their most important goals for 2016.
Allikas: Hubble’i teleskoobist
Milline võrratu võimalus: viia tunnetusteoreetiline TEADMUS taas KAUGMÕJU PRINTSIIBI juurde!
Alates/lõpetades aastast 1905., mil TEADLASED Lorentz’ja Poincare’ olid ) LOONUD “Aeglase ekektroni kinemaatika-teooria”*)- ja millest “said räbalad” – pärast Einsteini poolt pügamist ja “mõjude piiramist – valguse kiirusega”!?
*) “Aeglased elektronid liiguvad täpselt niimoodi, et ei oleks võimalik kinemaatiliselt täheldada nende liikumisest tekkida võivaid efekte.”
Samamoodi: me ei saa “vaadelda valguspilte” – jäädes Valgussignaali piirangutesse!?
“Kaugmõju printsiip” eeldab: “Mistahes süsteemi kinemaatilised olekud – on Süsteemi-siseselt mõõdetavad valgussignaaliga; Süsteemiväliselt olekumuutused pole täheldatavad – Süsteem käitub tervikuna.”
Seega, asjakohaselt:
– Süsteemisisene Vaatleja ei ole pädev kirjeldama Välis-Süsteeme”!



You must be logged in to post a comment.